| |
|||||
|
|||||
| |
|||||
|
|||||
 |
| Архивная публикация |
| Архивная публикация |
|
||||||||
|
|
||||||||
| © Любая перепечатка или тиражирование только с согласия автора. Разрешается изготовление копий для личного пользования. |
|
Опубликована новая, восьмая, редакция данной книги. Книга существенно переработана в связи с продолжением теоретического исследования.
Андрей ПУЗИКОВ Дата публикации Механика Беспредельности
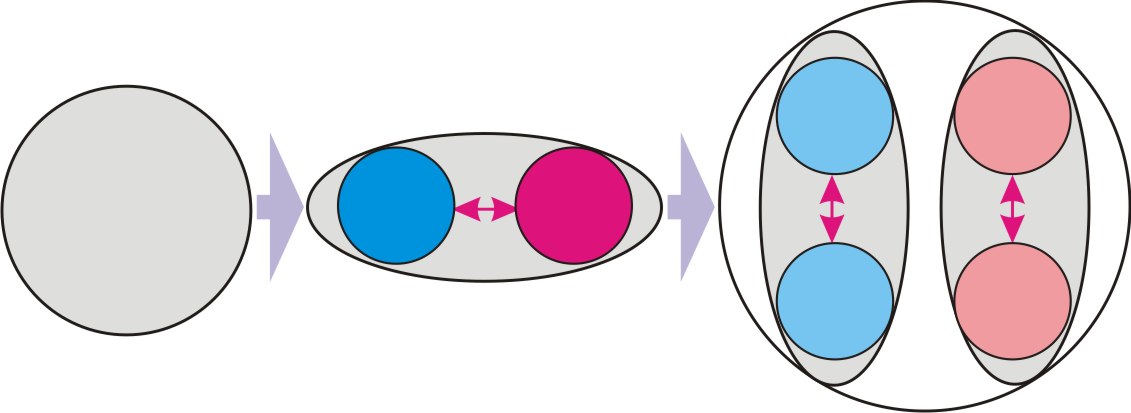
Предисловие к седьмой редакции По мере продвижения теоретического исследования возникает необходимость серьезной коррекции сделанных ранее выводов, исправления ошибок, неизбежных в столь новом и неизведанном наукой направлении, и добавления новых аспектов исследования. Но именно благодаря периферийным ошибкам укрепляется правильность основного пути, когда каждая найденная ошибка не ведет к разрушению основного здания логики, а, наоборот, делает его стройнее и открывает ряд новых, незамеченных ранее ценных находок. В этой седьмой редакции книга полностью переработана. Помимо исправления некоторых некорректных и, иногда, ошибочных логических построений для объяснения найденных правильных формул, автором была поставлена задача максимально облегчить восприятие материала читателем. Изложение материала, насколько это возможно, адаптировано к принятой в современной физической науке терминологии. Максимально сокращено использование новых терминов с приданием им системного, более удобного для запоминания характера. С этой же целью изменены и некоторые обозначения физических величин. Предисловие С чего всё началось? Согласно теориям современной физики, основанным на опытных данных, наша Вселенная зародилась в результате «Большого взрыва». Но, можно ли считать «Большой взрыв» началом всего? Само понятие взрыва предполагает наличие условий для этого взрыва, в данном случае – сверхплотного состояния материи. Но как сформировались эти условия? Физическая наука претендует на отражение объективной реальности, при этом она сама формировалась по законам этой реальности и является ее следствием. Все законы физики индуцировались из физического опыта, который в свою очередь базируется на органах восприятия человека и его способности формировать в своем внутреннем представлении модели, отражающие логику физического мира. Таким образом, физическая наука в процессе своего формирования зажата жесткими рамками возможностей человеческого представления, которые в свою очередь сформированы физическими условиями бытия. Именно эти представления диктуют постановку тех или иных физических опытов и экспериментов. Получается замкнутый круг. Математика позволяет несколько раздвинуть рамки этого круга, создавать модели, выходящие за рамки предметного представления, например: многомерные пространства. Но, по существу, это всего лишь иллюзия выхода за рамки привычных трехмерных предметных представлений. Математическое добавление одного или нескольких дополнительных измерений к трехмерному пространству не меняет логики этого пространства, иными словами – не выходит за рамки логики человеческого пространственного представления. Даже введение в формулы мнимых чисел, по факту, всего лишь способ привязать объяснение физических процессов к двумерному числовому ряду – все той же привычке геометрического представления в пространстве, которое можно искривлять, согласно Эйнштейна, но оно при этом остается единым пространством – некоей первородной сущностью, неким «богом», в которого физики свято верят, и который воздвигнут на месте некогда свергнутого другого «бога» - эфира. Еще печальнее дело обстоит с понятием физического времени. Представление времени в современной физике как непрерывного сколь угодно делимого пространственного измерения с одной стороны тешит буйную человеческую фантазию, но с другой – уводит науку в тупик вековых привычек восприятия. Но если попытаться выйти за все эти рамки человеческих представлений и математических моделей? Если принять во внимание простой факт – любые рамки и ограничения являются следствием некоего формирующего их процесса. Но процесс формирования тех или иных рамок сам происходит в рамках, определенных для него неким предыдущим процессом. Вполне логичен вопрос: а было ли начало у этого процесса последовательного формирования рамок и ограничений, следствием которого является наш физический мир? Решение этого вопроса методами современной физической науки предполагает индукцию первопричины из следствия – нашего физического бытия. Возможно, этот путь рано или поздно даст необходимый ответ. Но на данный момент дальше некоего неопределенного понятия сверхплотной материи, породившей «Большой взрыв», наука шагнуть не может. Но есть и другой путь – не индуцировать причину из следствия, а предположить наличие первопричины, не ограниченной никакими рамками или пределами, и на основе строгой логики построить теоретическую модель того, что должно стать следствием этой первопричины. В данном труде я представляю читателям теоретическую модель формирования физической реальности, на основе постулата о существовании Беспредельности, того, что не имеет пределов и стоит выше всех первопричин, так как включает в себя их всех. Случайная флуктуация в Беспредельности порождает процесс своего многократного проецирования, идущий нарастающими циклами. Нулевой цикл, делит Беспредельность на четыре тождественные части – четыре измерения. Восьмым циклом в этой последовательности является наша физическая Вселенная, каждое из четырех измерений которой состоит из 2128 частей. Это, так называемое, основное число нашей Вселенной, ее квантовая характеристика — число квантов состояния, составляющих ее полный цикл. Это единственное новое и неизвестное ранее науке число, которое входит в формулы данной модели. Но одного этого числа оказалось достаточно, чтобы свести друг к другу формулы всех основных физических постоянных, размеры элементарных частиц, атомов и Вселенной, связать массу элементарных частиц с их размерами, вычислить полный цикл Вселенной и его пройденную часть, получить точное значение времени распада свободного нейтрона, значение массы электрона относительно массы нейтрона, объяснить ядерные силы, явление инерции, постоянство скорости света и ее независимость от движения системы отсчета, и многое другое. Преимущество этой модели не только в том, что она дает объяснение всем физическим явлениям, объясняет мерность пространства и время, но и сводит все физические законы к единому механическому процессу взаимодействия проекций в физическое пространство элементарных локализаций, полностью тождественных локализации Вселенной. Полными проекциями элементарных локализаций являются свободные нейтроны, а частичными – все остальные элементарные частицы. И само физическое пространство не более чем относительное пространство условий в проекции в систему отсчета, связанную с нашей планетой. Те или иные условия определяют разные пространства, которые могут быть полностью неопределенными друг относительно друга, или быть связанными общими условиями. Время, как последовательность квантов состояния, целостных и неделимых актов выбора реальности, смещающихся со скоростью света по одному из измерений пространства, вместо принятого в традиционной физике принципа непрерывного течения времени — одно из главных отличий этой модели от традиционных. -------------------В основу дальнейшего теоретического исследования положим следующий постулат: Постулат: Существует нечто, что не имеет ограничений и пределов. Назовем это Беспредельностью: Беспредельностью называется то, что не имеет ограничений. Докажем основную теорему Беспредельности. Беспредельность, или то, что не имеет ограничений, всеобъемлюще. Доказательство: Допустим, что есть нечто, что не охватывается Беспредельностью. В этом случае на Беспредельность накладывается ограничение, выраженное в том, что Беспредельность не охватывает это нечто. Это противоречит определению Беспредельности. Следовательно, теорему можно считать доказанной. Из свойства всеобъемлемости необходимо следует потенциальное свойство неограниченной возможности деления на части. Назовем это принципом делимости. Принципом делимости называется потенциальное свойство Беспредельности неограниченно делиться на части. В связи с этим докажем следующие теоремы: Любая часть Беспредельности тождественна всей Беспредельности. Доказательство: Если в какой-либо части Беспредельности имеются некие ограничения, из этого следует, что сама Беспредельность ограничена этими ограничениями в этой своей части, что противоречит определению Беспредельности. Следовательно, части Беспредельности не могут иметь ограничения, и тем самым являются полностью тождественными всей Беспредельности в соответствии с определением. Теорему можно считать доказанной. Из теоремы (т2) следует, что все части Беспредельности являются частями любой другой ее части. Беспредельность симметрична относительно любой из своих частей Доказательство: Допустим, что Беспредельность несимметрична относительно одной из своих частей, это означало бы, что Беспредельность делится на две нетождественные друг другу части, что противоречит теореме (т2). Теорему можно считать доказанной. Из теоремы (т2) и теоремы (т3) следует, что любая часть Беспредельности симметрична относительно любой другой ее части. Как мы уже отметили в первой главе, Беспредельность, как всеобъемлющее явление, включает в себя принцип делимости. Однако потенциальная возможность разделения на части не означает наличие некоего конкретного разделения С другой стороны, из принципа отсутствия ограничений необходимо следует стопроцентная вероятность выделения некоей части в Беспредельности, как случайной флуктуации. Это выделение части в Беспредельности является процессом, который накладывает на Беспредельность ограничивающие условия – наличие момента начала процесса и его локального положения в Беспредельности. Поскольку в отношении самой Беспредельности ограничения на нее наложены быть не могут, эти ограничивающие условия отражаются только в относительности самого ограничивающего процесса, как системы отсчета. Любое ограничение в Беспредельности может существовать только в системе отсчета, связанной с этим ограничением. Случайная флуктуация представляет собой первый акт ограничения, накладываемого на самое себя. Из условия отсутствия иных условий и ограничений необходимо следует полное отсутствие сравнительных свойств, размеров и характеристик случайной флуктуации, кроме того, что она локализована в Беспредельности, и соответственно, меньше нее. Во всем остальном флуктуация, как часть Беспредельности, по теореме (т2) полностью тождественна Беспредельности. Своим актом выделения случайная флуктуация в собственной относительности делит Беспредельность на две тождественные части: себя, как материальное явление, и Беспредельность, как потенциальную субстанцию, в которой она выделилась. Но стоит учесть то, что выделившаяся часть не может выйти за свое собственное ограничение, или иными словами отразить нечто, находящееся за пределами ее собственного ограничения. Из этого условия следует, что не только сама выделившаяся часть, но и Беспредельность, как дополняющая часть, проецируется относительно выделившейся части в ограниченном варианте. Это комплексное явление из двух тождественных частей Беспредельности, ограниченное одним ограничением, приобретает свое объективное бытие. Назовем это локализацией и дадим следующие определения: Локализацией называется часть Беспредельности с наложенным на нее ограничивающим условием выделения части в собственной внутренней относительности этого условия. Материальной частью локализации называется объективно выделенная и локализованная часть, образующая локализацию. Потенциальной частью локализации называется проекция Беспредельности в ограничивающие условия локализации. Рассматривать процессы в локализации мы можем только в системе отсчета, связанной с ее материальной частью: Локальной системой отсчета называется система отсчета, связанная с материальной частью локализации. Всё, что, так или иначе, отражается в локальной системе отсчета, находится внутри локализации, и ничего за пределами локализации отразиться в локальной системе отсчета не может. Таким образом, все объективные процессы внутри локализации определяются наложенным ограничением и существуют исключительно внутри этого ограничения. Докажем еще одну важную теорему. Каждый последующий акт наложения ограничивающих условий происходит в уже существующих условиях и не может изменить их. Доказательство: Любое ограничивающее условие редуцирует всю Беспредельность в полностью замкнутые этим условием ограничения. Таким образом, любое новое ограничивающее условие, накладываемое внутри предыдущего ограничивающего условия, накладывается на Беспредельность в редукции к предыдущему условию в его замкнутом ограничении и не может выйти за это ограничение, то есть изменить его. Теорему можно считать доказанной. Локализацию, порожденную случайной флуктуацией в Беспредельности, назовем первичной. Ограничивающим условием первичной локализации является принцип разделения Беспредельности на две части, с выбором одной из них в качестве материального проявления, с которым связана локальная система отсчета. В соответствие с теоремой (т2), по принципу тождества с Беспредельностью в ограничении условием разделения на две части, материальная и потенциальная части должны аналогично разделяться внутри себя на две части, рис. 1.
Рис. 1. Таким образом, первичная флуктуация в своей внутренней относительности состоит из четырех выделенных частей. В соответствии с выводом (в1), все эти части одновременно являются частями каждой из них. Это свойство мы можем назвать проекцией друг в друга, рис. 2.
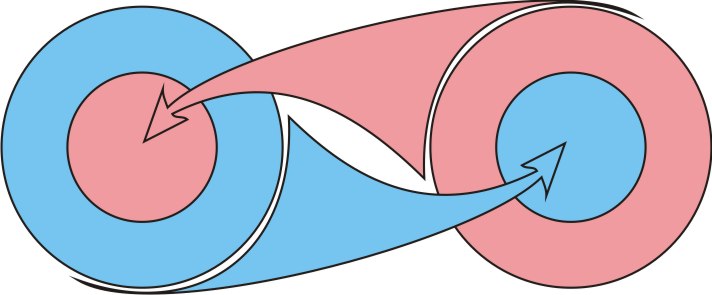
Рис. 2. Проекцией одной части Беспредельности в другую называется свойство каждой части включать в себя другую часть, как собственную. На первый взгляд может показаться, что из принципа тождества частей должно следовать, что каждая новая часть процесса деления должна в свою очередь делиться на две части, и этот процесс разделения с выделением новых частей будет бесконечным. Однако это не так. Разделение каждой из частей на две тождественные вторичные части не означает добавления новых частей. В каждую из двух вторичных частей одной части первичного деления проецируется аналогичная вторичная часть второй части первичного разделения, рис. 3, a).
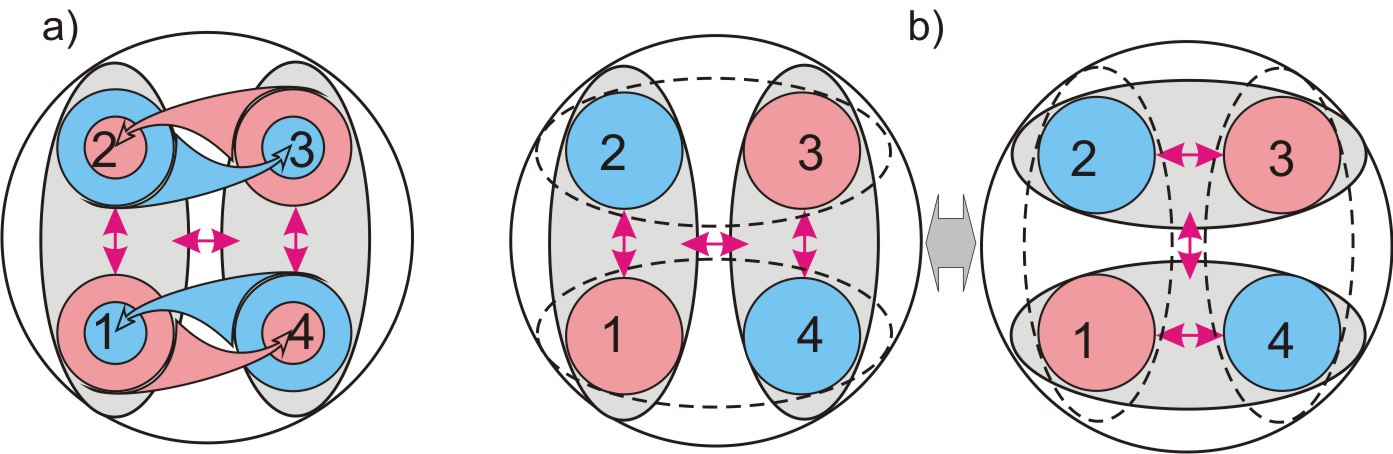
Рис. 3. Этот процесс разделения на две части и взаимной проекции друг в друга полностью тождественен и симметричен относительно каждой из четырех частей первичного разделения, рис. 3, b). При этом все остальные части проецируются в каждую из них. Таким образом, процесс выделения частей путем разделения каждой из частей на две части замыкается сам на себя и завершается выделением четырех тождественных частей, составляющих первичную локализацию. Случайная флуктуация, как первичный акт выделения части в Беспредельности, вызывает процесс разделения на две части, который необходимо завершается выделением в ней четырех тождественных частей в относительности выделившейся части. Дадим следующие определения: Основными частями локализации называются: материальная часть, образующая локальное явление и потенциальная часть, представляющая собой Беспредельность в редукции к ограничивающему условию выделенной части. Вторичными частями локализации называются четыре тождественных части, выделенные путем проекции процесса разделения на две части в обе основные части. 3. Последовательность локализаций Рассматривать процессы, которые происходят за рамками локализации, корректно только в системе отсчета, вынесенной за ее ограничивающие условия: Внешней системой отсчета называется система отсчета, вынесенная за ограничивающие рамки локализации. Эту систему отсчета в некоторой условности можно считать «взглядом из Беспредельности». Во внешней системе отсчета локализованным материальным явлением является вся первичная локализация. Таким образом, аналогично случайной флуктуации, вся комплексная первичная локализация представляет собой материальную часть новой локализации. Определим первичную локализацию как локализацию нулевого порядка, а образованную на ее основе – локализацией первого порядка. Обратим внимание на то, что локальная система отсчета, связанная с локализацией первого порядка, является внешней по отношению к локализации нулевого порядка. Относительно локальной системы отсчета, связанной с локализацией первого порядка, все четыре выделенные части локализации нулевого порядка ничем не отличаются друг от друга и на основании теоремы (т2) и вывода (в1) полностью идентичны. Это условие предварительного разделения материальной части на четыре идентичных части определяет процесс формирования локализации первого порядка. По принципу тождества (теорема (т2)) потенциальная часть локализации первого порядка аналогично должна состоять из четырех выделенных идентичных частей, рис. 4, a).
Рис. 4. И в каждую из этих частей потенциальной части в соответствии с выводом (в1) должны проецироваться все части материальной части. И, наоборот, в каждую из частей материальной части должны проецироваться все части потенциальной части. Из этих условий следует, что общее количество идентичных частей в локализации первого порядка равно квадрату числа тождественных частей в каждой из ее основных частей – 42 = 16. Эта локализация первого порядка относительно внешней системы отсчета аналогичным образом представляет собой материальную часть локализации второго порядка, состоящую из 16 идентичных частей, рис. 4, b). Полное количество тождественных частей в локализации второго порядка будет равно 162 = 256. Таким образом, в результате случайной флуктуации в Беспредельности формируется последовательность локализаций с быстро растущим количеством частей внутреннего разделения. Если обозначим количество частей в каждой из четырех вторичных частей локализации как n, то, соответственно, количество частей в каждой основной части будет равно n2, а общее количество частей будет равно n4. Определяющим числом локализации называется целое положительное число n, равное количеству тождественных идентичных частей, на которые разделена каждая из четырех вторичных частей локализации. Материальная и потенциальная части локализации с определяющим числом n состоят из n2 своих тождественных частей, а общее количество частей в локализации – n4. В первичной локализации или локализации нулевого порядка n = 1, в локализации первого порядка n = 2, в локализации второго порядка n = 4, в локализации третьего порядка n = 16. Определяющее число локализации следующего порядка, начиная с локализации первого порядка, равно квадрату определяющего числа локализации предыдущего порядка. Таким образом, можем записать формулу определяющего числа локализации по последовательности образования локализаций, начиная с локализации первого порядка: n = 2(2k-1) (01), где k - порядок локализации. Рассчитаем размер локализаций первого порядка значений k: L(0): n = 1 L(1): n = 2 L(2): n = 4 L(3): n = 16 L(4): n = 28 = 256 L(5): n = 216 = 65536 L(6): n = 232 = 4294967296 L(7): n = 264 = 18446744073709551616 L(8): n = 2128 = 3,40282366920938*1038 L(9): n = 2256 = 1,15792089237316*1077 Логика процесса подсказывает нам, что наша физическая Вселенная является локализацией в Беспредельности и занимает определенное место в этой последовательности. В следующих главах на основании полного совпадения теоретических расчетов с экспериментальными физическими данными мы докажем, что наша Вселенная является локализацией восьмого порядка с определяющим числом n = 2128. В локальной системе отсчета материальная часть ограничена условием локального выделения и, как следствие, не совпадает с потенциальной. Они тождественны (теорема (т2)), но не совпадают друг с другом. Этот принцип несовпадения тождественно проецируется и во вторичные части локализации. Таким образом, все четыре вторичные части локализации не совпадают друг с другом. При этом они должны быть тождественны и в соответствии с выводом (в1) каждая из них должна включать в себя остальные три со всеми их частями. На первый взгляд эти условия выглядят противоречащими друг другу. Но именно наличие всех этих условий определяет то, что мы привыкли воспринимать как физическое пространство. Рассмотрим это на примере двумерного пространства.
Рис. 5. На рис. 5, a) изображены две несовпадающие друг с другом полностью тождественные и равные части. При этом каждая из них отвечает условию симметрии относительно другой. В соответствии с выводом (в1) все части одной из этих двух частей проецируются (определение (о7)) в каждую из частей другой части, рис. 5, b) и c). В случае с локализацией, таковых, проецирующихся друг в друга и несовпадающих частей четыре. Две из них являются частями материальной части, две других – потенциальной. Но, исходя из того же вывода (в1), все они должны проецироваться, как в материальную, так и в потенциальную часть. Таким образом, локализация в своей внутренней структуре в относительности локальной системы отсчета – четырехмерна, а количество частей в каждом из четырех ее измерений равно ее определяющему числу n. Эта четырехмерная структура состоит из двух двумерных структур, коими являются две основные части локализации. Внутреннее пространство локализации четырехмерно и определяется проецирующимися друг в друга двумя двумерными основными частями локализации. Количество частей в каждом из четырех измерений локализации равно определяющему числу локализации n. Процесс формирования четырехмерной структуры внутреннего пространства каждой локализации инициируется начальным актом выделения ее материальной части. Из этого следует еще один важный вывод: Четырехмерная структура локализации каждого порядка формируется исключительно в связанной с ней локальной системе отсчета и не зависит от аналогичной структуры локализации предыдущего порядка. 5. Цикл восстановления симметрии В локальной системе отсчета материальная часть не симметрична относительно потенциальной части. Таким образом, в результате акта выделения материальной части происходит нарушение симметрии в локализации. Как следствие, в условиях отсутствия иных ограничений кроме условий, сформировавших локализацию, акт выделения материальной части должен повториться в ее потенциальной части, причем количество этих повторений зависит от определяющего числа локализации, до полного исчерпания возможностей потенциальной части. Акт выделения материальной части необходимо повторяется в потенциальной части локализации. Таким образом, весь цикл повторений материальной части локализации мы можем определить как цикл восстановления симметрии. Циклом восстановления симметрии называется полный цикл повторений акта выделения материальной части в локализации, до момента заполнения всего двумерного пространства ее потенциальной части. В относительности внешней системы отсчета весь полный цикл локализации представляет собой одно целостное явление, в котором положение материальной части является неопределенным, то есть представляет собой суперпозицию всех альтернативных вариантов своего положения. При этом эта суперпозиция равномерно заполняет все ограниченное пространство локализации. Таким образом, относительно внешней системы отсчета локализация представляет собой полностью внутренне симметричное явление относительно всех своих частей. Относительно внешней системы отсчета локализация представляет собой суперпозицию всех альтернативных положений своих частей и полностью симметрична относительно каждой из них. Относительно локальной системы отсчета последовательность актов выделения материальной части по циклу восстановления симметрии представляет собой одномерный процесс. Поскольку потенциальная часть состоит из двух тождественных частей - измерений, локальная система отсчета должна быть связана с одним из измерений двумерной структуры потенциальной части, а начальный акт выделения должен определять момент отсчета на нем. Отсутствие ограничения по выбору направления движения процесса, а также принцип симметрии (теорема (т3)) определяют движение процесса симметрично в обоих направлениях по выбранному измерению. Определенным измерением называется измерение, ограниченное условием выбора момента отсчета цикла восстановления симметрии. Это ограничивающее условие лишает определенное измерение свойства полной внутренней симметрии относительно своих частей, что и отражается в цикле восстановления симметрии. Таким образом, определенное измерение, как тождественная часть Беспредельности ограничено тремя условиями: определяющим числом локализации n, двумя направлениями движения цикла по нему и наличием момента отсчета. Из этого необходимо следует важный вывод: Процесс повторения актов выделения материальной части по определенному измерению задает первичную меру протяженности, которая тождественно проецируется во все части и процессы внутри локализации, определяя их соизмеримость. Второе измерение двумерной структуры потенциальной части тождественно определенному, кроме одного ограничивающего условия – наличия момента отсчета. Назовем его неопределенным. Неопределенным измерением называется измерение, на которое не проецируется момент отсчета цикла восстановления симметрии. Из отсутствия определенности момента отсчета цикла по неопределенному измерению следует вывод: Начальный момент цикла восстановления симметрии относительно неопределенного измерения находится в суперпозиции всех своих альтернативных положений на нем. Одномерный процесс последовательности актов выделения материальной части должен проходить симметрично по всей материальной части. Из этого необходимо следует вывод: Двумерная структура потенциальной части формируется суперпозицией всех альтернативных направлений своего определенного измерения от первоначального акта выделения материальной части. В каждом из вариантов этой суперпозиции процесс проходит симметрично в противоположных направлениях по определенному измерению, рис. 6.
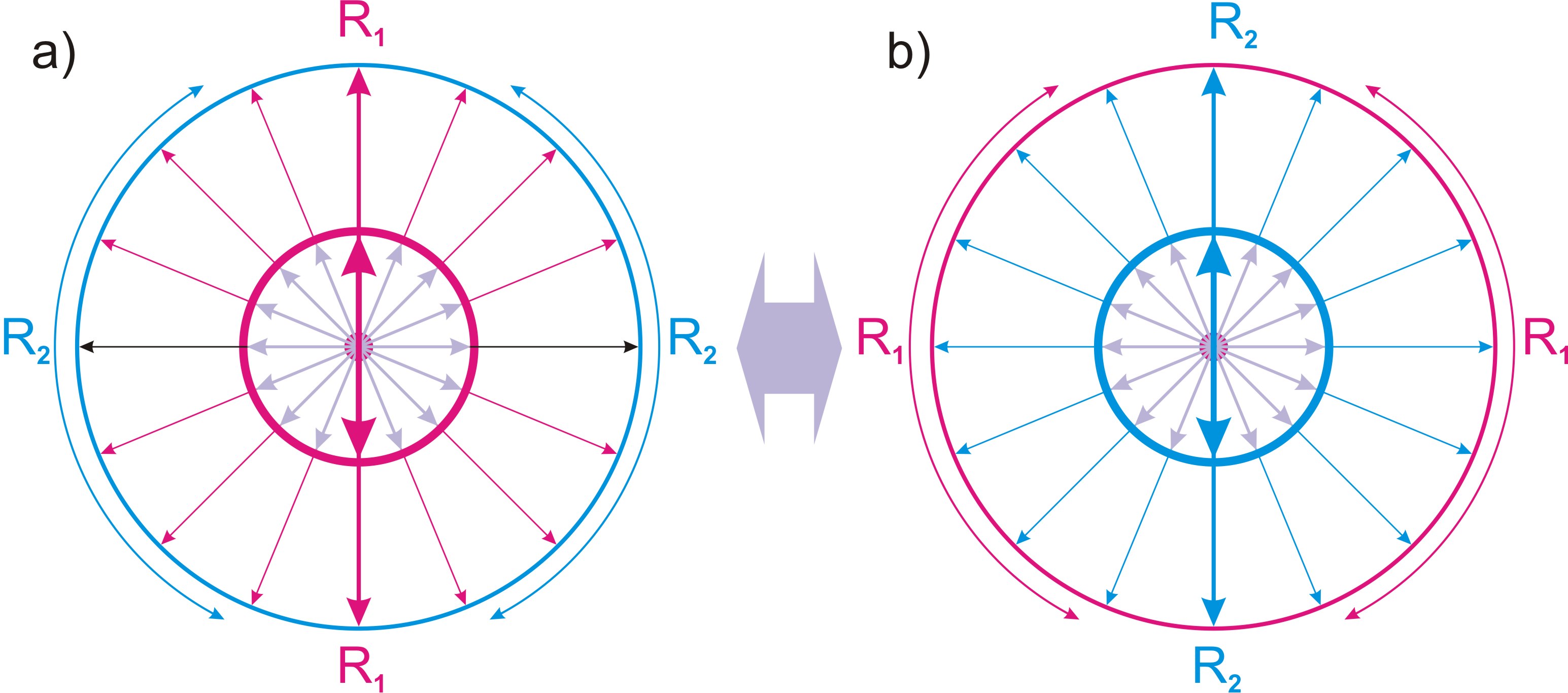
Рис. 6. Наличие двух противоположных направлений по каждому из измерений является проекцией в них принципа первичного разделения на две части. Ограничивающее условие, накладываемое на определенное измерение, необходимо должно отражается и на его размере. Как результат, определенное измерение должно быть короче по размеру, второго неопределенного измерения потенциальной части. Относительно всего процесса восстановления симметрии приходим к выводу: Процесс повторения материальной части происходит по определенному измерению двумерной структуры потенциальной части, с которым связана система отсчета, симметрично во все стороны и представляет собой расширяющуюся окружность, в центре которой находится первичный акт выделения материальной части. Двумерная структура потенциальной части представляет собой круг, диаметр которого равен полному размеру определенного измерения, а длина окружности – полному размеру неопределенного измерения. Отношение полного размера неопределенного измерения, как длины окружности, к полному размеру определенного, представляющего собой ее диаметр, определяет числовое значение числа π. Сокращение размера определенного измерения в связанной с ним системе отсчета относительно неопределенного измерения определяет число π. Из условия тождественности обоих измерений потенциальной части следует принцип относительности привязки системы отсчета к одному из них, рис. 7.
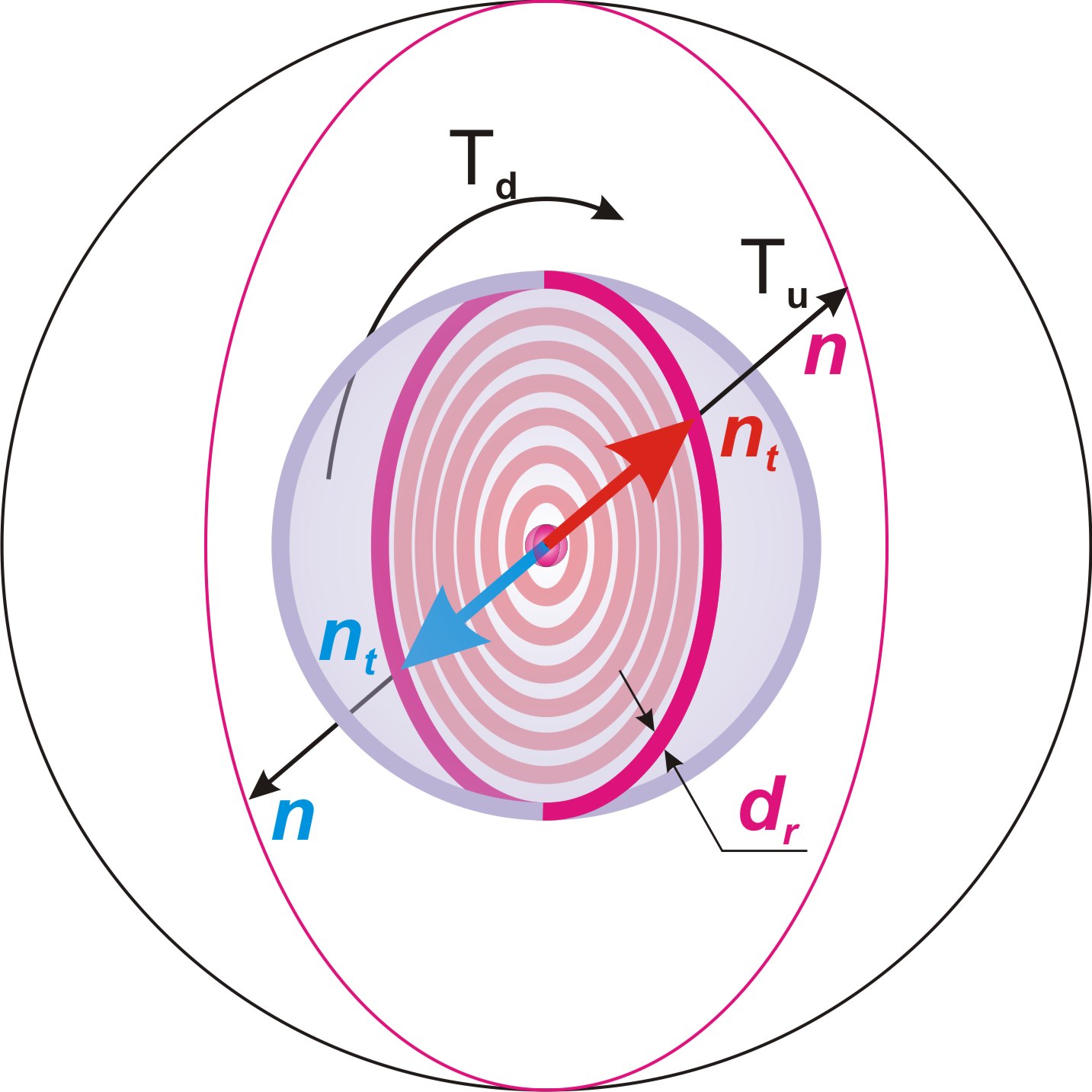
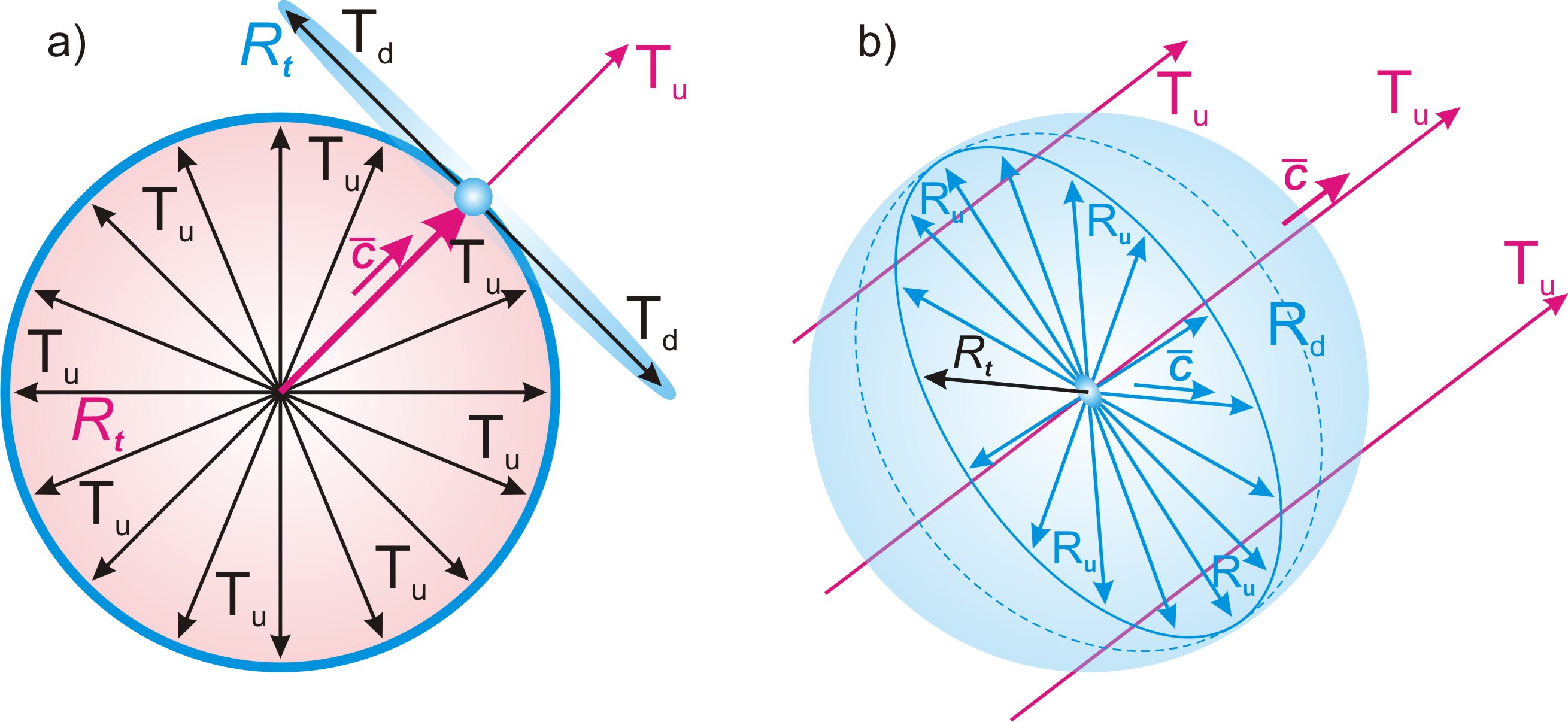
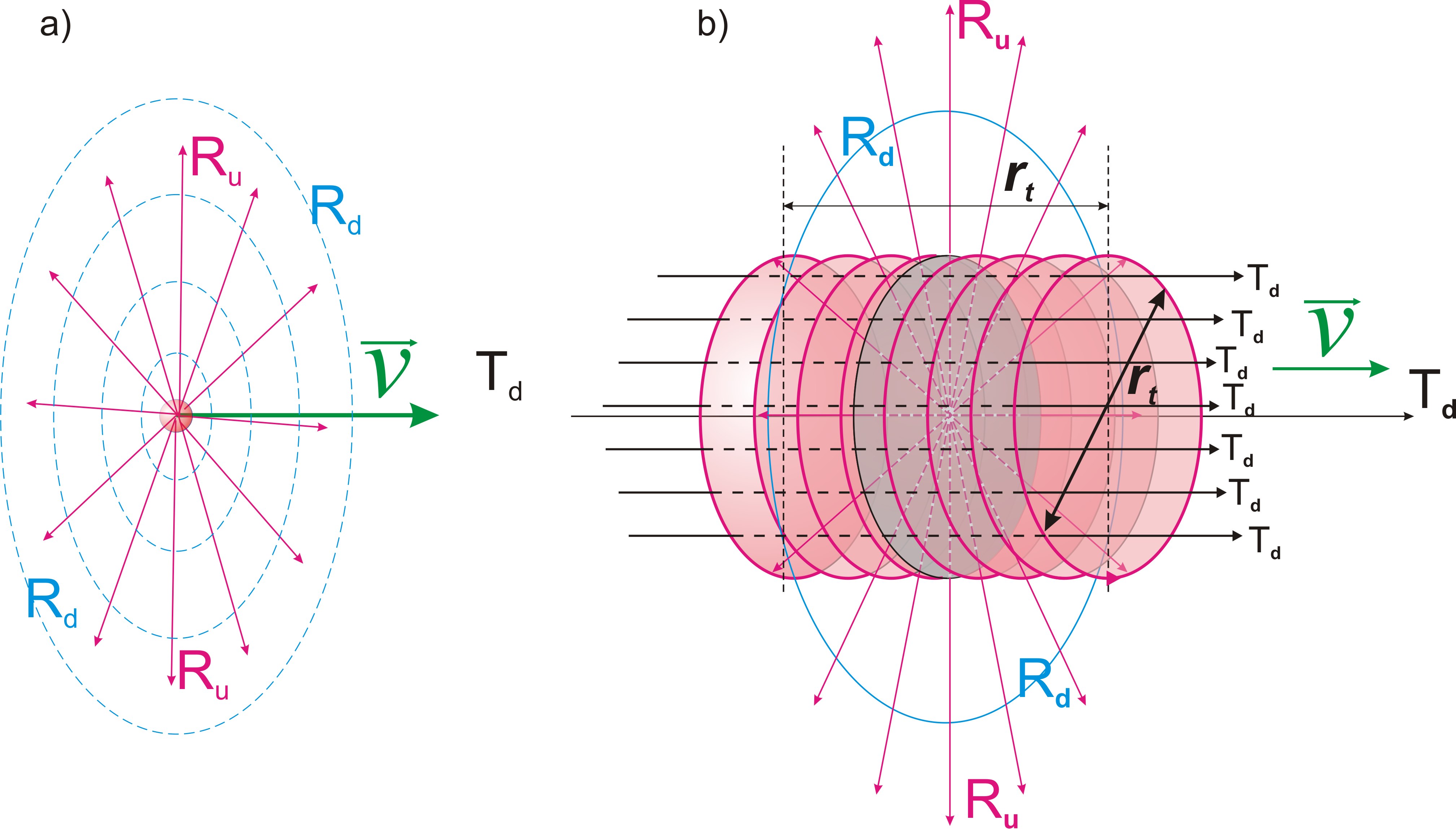
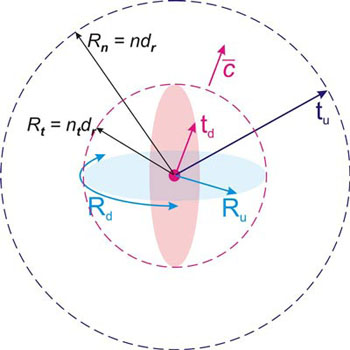
Рис. 7. На рис. 7, a) локальная система отсчета связана с измерением R1, а на рис. 7, b) с измерением R2. Цикл восстановления симметрии внутри локализации не зависит от выбора системы отсчета, связанной с одним из двух измерений ее потенциальной части, и протекает одинаково в каждой из них. Двумерная структура потенциальной части с условием определенности своего центра отражается в каждой части двумерной структуры материальной части, из чего необходимо следуют выводы: Внутреннее пространство локализации представляет собой четырехмерный шар, как четырехмерную суперпозицию всех альтернативных положений двумерной структуры ее потенциальной части. Определенное измерение потенциальной части представляет собой диаметр внутреннего пространства локализации с двумя противоположными направлениями движения по нему цикла восстановления симметрии. Что касается двух измерений материальной части локализации, то в локальной системе отсчета они не определены никакими иными условиями, кроме условия тождественности двух основных частей, коими вторичными частями они являются. Соответственно, на два измерения материальной части должно проецироваться взаимное соответствие двух измерений потенциальной части. В локальной системе отсчета материальная часть локализации тождественно потенциальной части формируется определенным и неопределенным измерениями. Локальная система отсчета связана с материальной частью и тождественно повторяется в каждом последующем акте ее выделения. Таким образом, мы можем говорить о единой локальной системе отсчета для всего внутреннего цикла локализации, представляющего собой ограниченную последовательность состояний материальной части. Эта последовательность состояний материальной части является тем, что мы воспринимаем как течение времени. Быстрая смена состояний в сравнении с возможностями регистрации этого процесса органами чувств человека создает иллюзию непрерывного течения времени. Эта концепция прочно укоренилась в физической науке, несмотря на явные проблемы ее использования в квантовой механике. Время дискретно и состоит из отдельных состояний. Последовательность этих состояний определяет последовательность причин и следствий. Квантом состояния называется каждый акт выделения материальной части локализации в ее цикле восстановления симметрии. Время представляет собой последовательность квантов состояния. К каждому кванту состояния в отдельности понятие течения времени неприменимо, а внутренние процессы неопределенны и представляют собой суперпозицию альтернативных вариантов и последовательностей. Этот вывод следует из факта отсутствия каких-либо иных ограничений, накладываемых на материальную часть, кроме условия ее локального выделения. Одномоментными называются процессы, происходящие внутри кванта состояния. Каждый квант состояния в последовательности времени представляет собой суперпозицию альтернативных последовательностей своих внутренних процессов. Количество альтернативных вариантов в каждом конкретном случае определяется действующими в этом случае условиями. Исходя из того, что все размерные характеристики внутренних процессов локализации определяются движением материальной части по определенному измерению, назовем его становым. Становым [ударение на первом слоге] измерением называется определенное измерение двумерной структуры потенциальной части локализации, по которому реализуется последовательность квантов состояния материальной части или время. Проекцию кванта состояния на становое измерение определим как квант протяженности. Квантом протяженности называется проекция кванта состояния на становое измерение. Обозначим размер кванта протяженности в единицах длины, как dr, а в единицах времени, как dt. Количество квантов состояния в последовательности времени равно количеству квантов протяженности по становому измерению, которое в свою очередь равно количеству выделенных в нем частей. Таким образом, в соответствии с определением (о11) количество квантов состояния в полном цикле локализации равно ее определяющему числу n. В локальной системе отсчета последовательный процесс смены квантов состояния материальной части представляет собой расширяющуюся трехмерную поверхность четырехмерной сферы, диаметром которой является становое измерение. Далее для обозначения станового измерения будем использовать символ Tu, а для второго неопределенного измерения потенциальной части – символ Td. Суперпозиция альтернативных положений станового измерения Tu определяет диаметр четырехмерной сферы, трехмерная поверхность которой представляет собой последовательность состояний материальной части локализации. Эта последовательность состояний, в свою очередь, представляет собой трехмерную суперпозицию двумерной окружности как проекции материальной части на двумерную структуру TuTd потенциальной части, толщина которой определяется размером кванта состояния dr по становому измерению Tu, рис. 8.
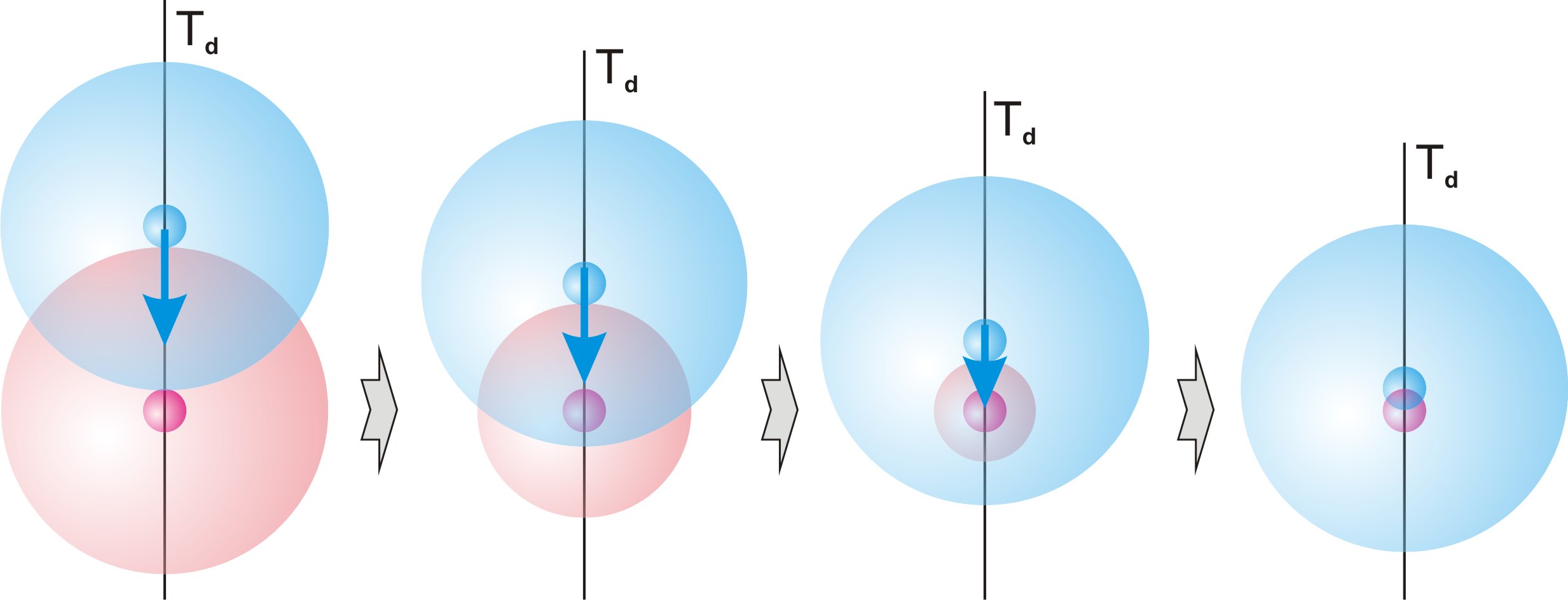
Рис. 8. Осуществление последовательности квантов состояния по одному из четырех измерений локализации не означает тождественности этого измерения процессу времени. Это два различных физических явления. Время, как последовательность состояний, всегда направлено в одну сторону и не может быть повернуто назад. В свою очередь становое измерение Tu, вдоль которого реализуется последовательность времени, тождественно другим измерениям имеет два направления. Скорость смещения материальной части в квантах состояния по становому измерению равна dr/dt . Ни одна из частей материальной части не может опередить ее движение во внутреннем пространстве локализации. Это дает нам основание обозначить ее так же, как традиционно в физике обозначается скорость света – буквой c. В следующих главах мы докажем, что свет движется в вакууме именно с этой скоростью. Скорость c = dr/dt является максимально возможной скоростью движения во внутреннем пространстве локализации. В локализации следующего порядка весь цикл предыдущей локализации становится первым квантом состояния. Таким образом, размер кванта состояния локализации следующего порядка в единицах длины равен ndr, а в единицах времени ndt. Соответственно, скорость движения по циклу будет равна: ndr/ndt = dr/dt = c =const (03) Скорость смещения материальной части по циклу локализации не зависит от ее порядка и является универсальной постоянной. Поскольку последовательность времени состоит из n квантов состояния, можем записать: Tn = ndt (04), где Tn - время полного цикла локализации. Rn = ndr (05), где Rn - радиус четырехмерного внутреннего пространства локализации. Rt = ntdr = Rnnt/n (06), где Rt – радиус четырехмерной сферы, трехмерной поверхностью которой является материальная часть локализации, nt - количество квантов состояния, пройденных основным циклом локализации. В первом акте последовательности времени материальная часть была сжата до размера в n раз меньшего, чем размер этой материальной части в последнем акте. Таким образом, процесс расширения с максимально возможной скоростью c является ничем иным, как «Большим взрывом», к выводу о котором подталкивают практические измерения и наблюдения нашей Вселенной, рис. 9.
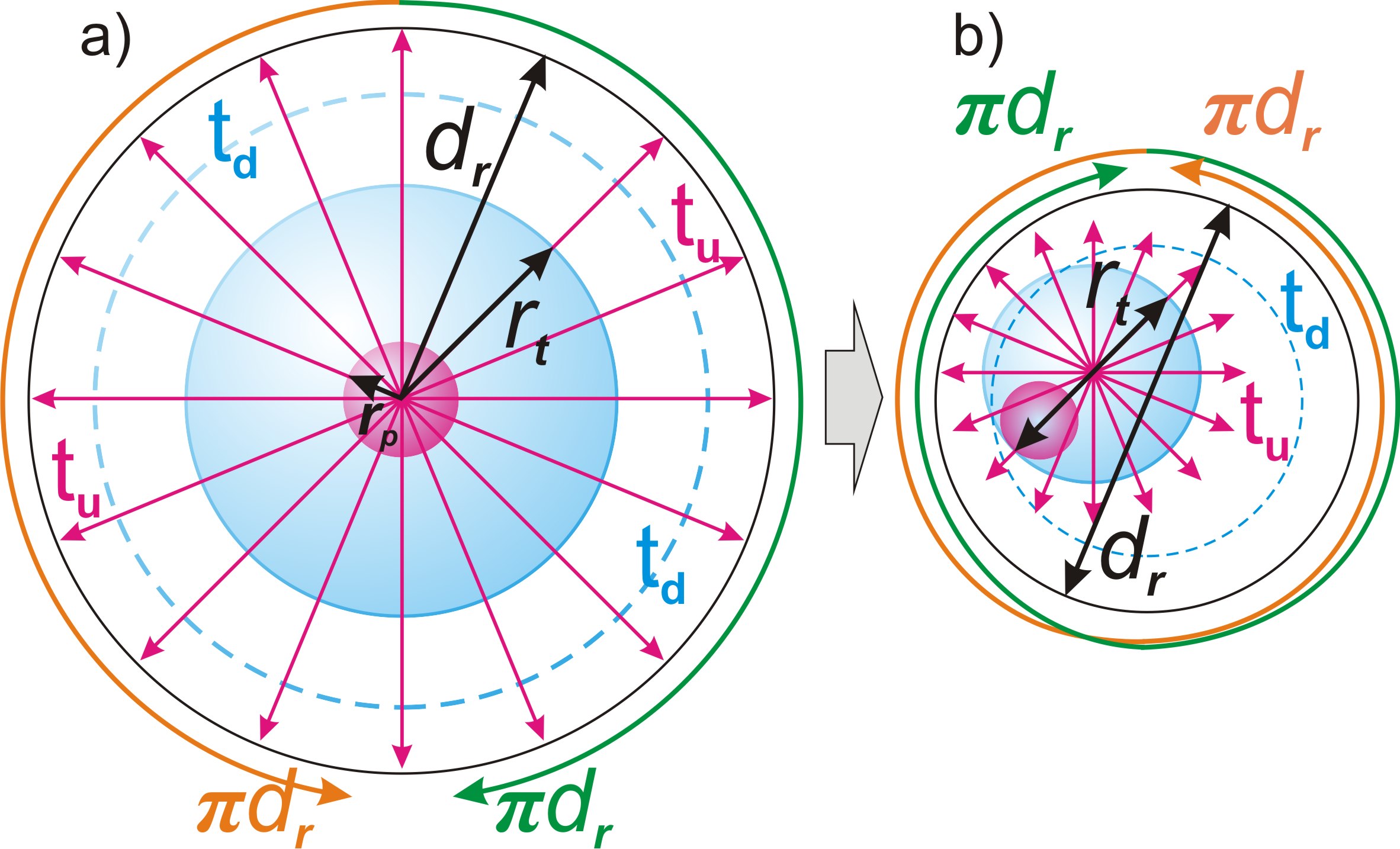
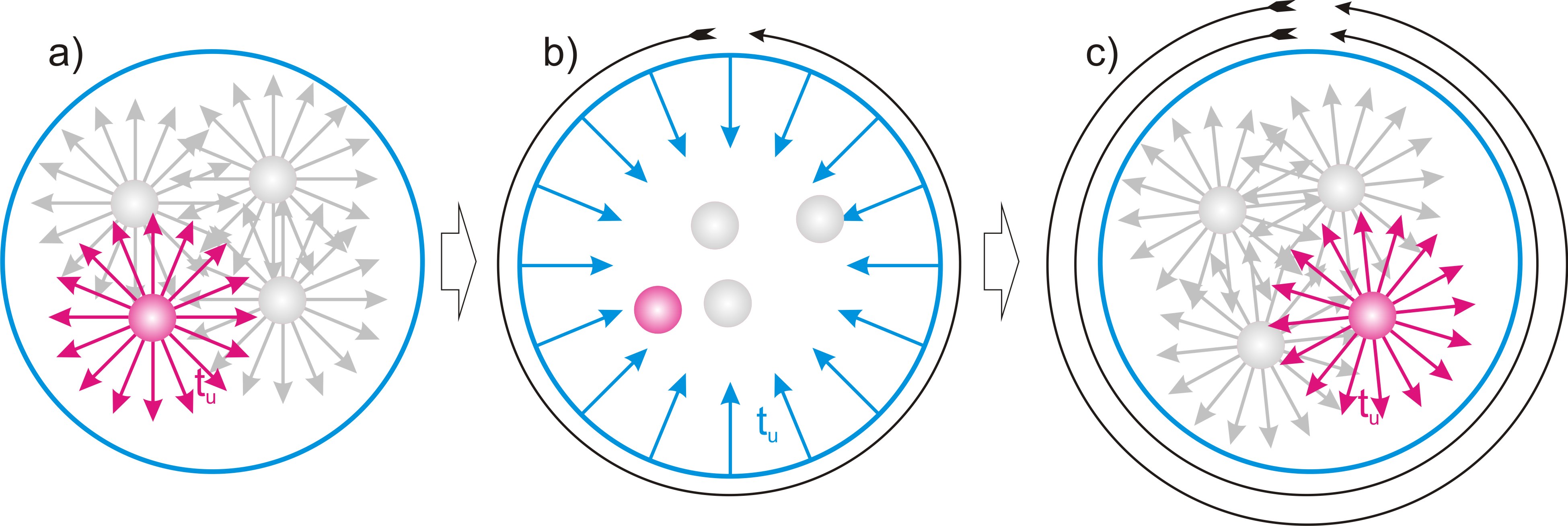
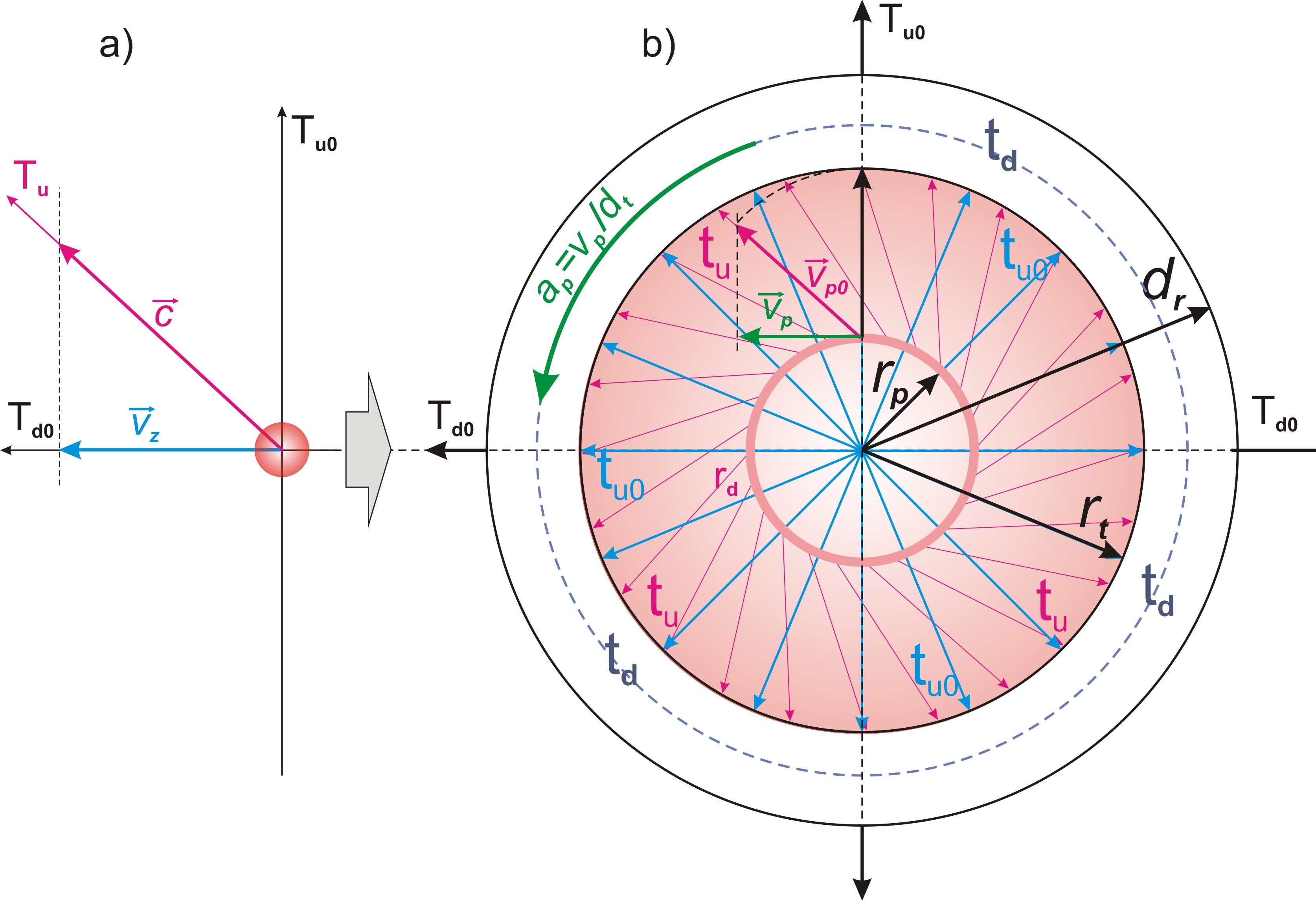
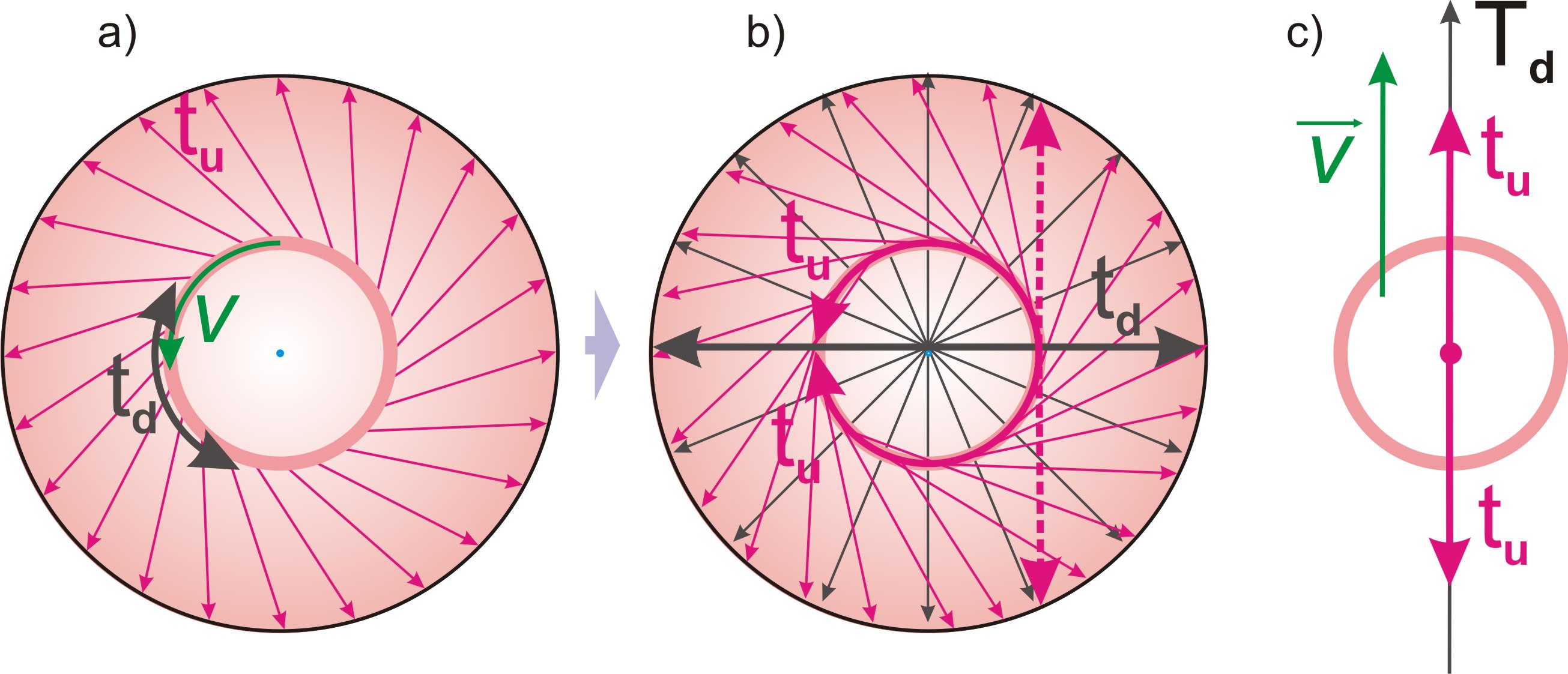
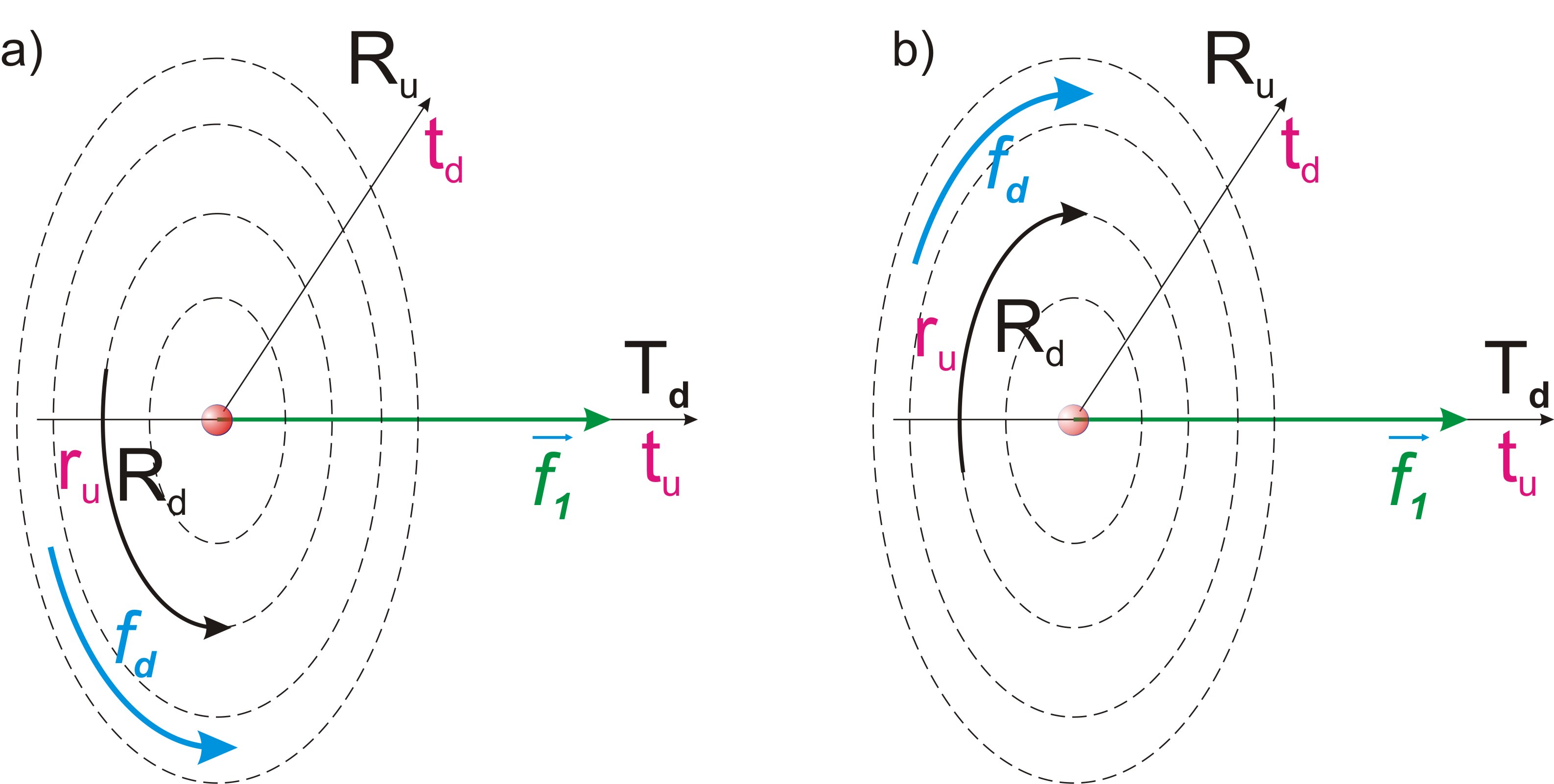
Рис. 9. «Большой взрыв», как начало существования нашей Вселенной, представляет собой начало последовательности квантов состояния по циклу восстановления симметрии в ее локализации. Таким образом «Большой взрыв» это не только первые мгновения существования нашей Вселенной, но ее состояние по всему циклу. По мере увеличения размера с максимальной скоростью c, относительные изменения размеров в небольшой локальной области, такой, как наш ближайший космос, становятся практически незаметными в сравнении с историческим периодом научных наблюдений. Но что будет с материальной Вселенной после завершения ее полного цикла? Внутренние процессы локализации в течение всего цикла полностью ограничены внутренней поверхностью четырехмерной сферы, замыкающей локализацию, и относительно локальной системы отсчета ничего за пределами этой поверхности не существует. По завершению полного цикла локальная система отсчета, связанная с материальной частью, переходит в локализацию следующего порядка, как локальная система отсчета, связанная со всей локализацией, завершившей свой цикл, которая в новой локализации представляет собой первый акт выделения ее материальной части. Иными словами – все n квантов состояний предыдущей локализации в новой локализации представляют собой одно одномоментное состояние. Таким образом, локальная система отсчета новой локализации следующего порядка представляет собой суперпозицию альтернативных последовательностей квантов состояний предыдущей локализации, как свое начальное одномоментное состояние. Это означает, что процесс расширения четырехмерного шара, порожденного случайной флуктуацией, продолжается неограниченно по последовательности стадий-локализаций, в каждой из которых течет свое время. Весь цикл локализации предыдущего порядка становится начальным одномоментным состоянием в локализации следующего порядка. 7. Местная система отсчета и физическое пространство В соответствии с выводом (в5) материальная часть локализации с определяющим числом n состоит из n2 своих тождественных частей. Относительно локальной системы отсчета все части материальной части не локализованы внутри нее. Таким образом, материальная часть представляет собой суперпозицию всех возможных альтернативных положений своих частей. Процесс случайной флуктуации, как локализации в Беспредельности, должен тождественно отражаться во всех ее частях. Соответственно и внутри материальной части должен происходить процесс случайного выбора и локализации ее частей, создающий новые системы отсчета. Для появления внутренней системы отсчета достаточно локализации одной части, выделяющей ее из других. При этом по принципу тождества автоматически выделяются и локализуются все остальные тождественные части внутреннего разделения. Местной системой отсчета называется система отсчета, связанная с локализованной частью внутри материальной части локализации. Расширяющаяся сфера суперпозиции альтернативных положений материальной части движется по становому измерению Tu во все стороны, но каждая точка на этой сфере движется строго в одном направлении, рис. 10, a).
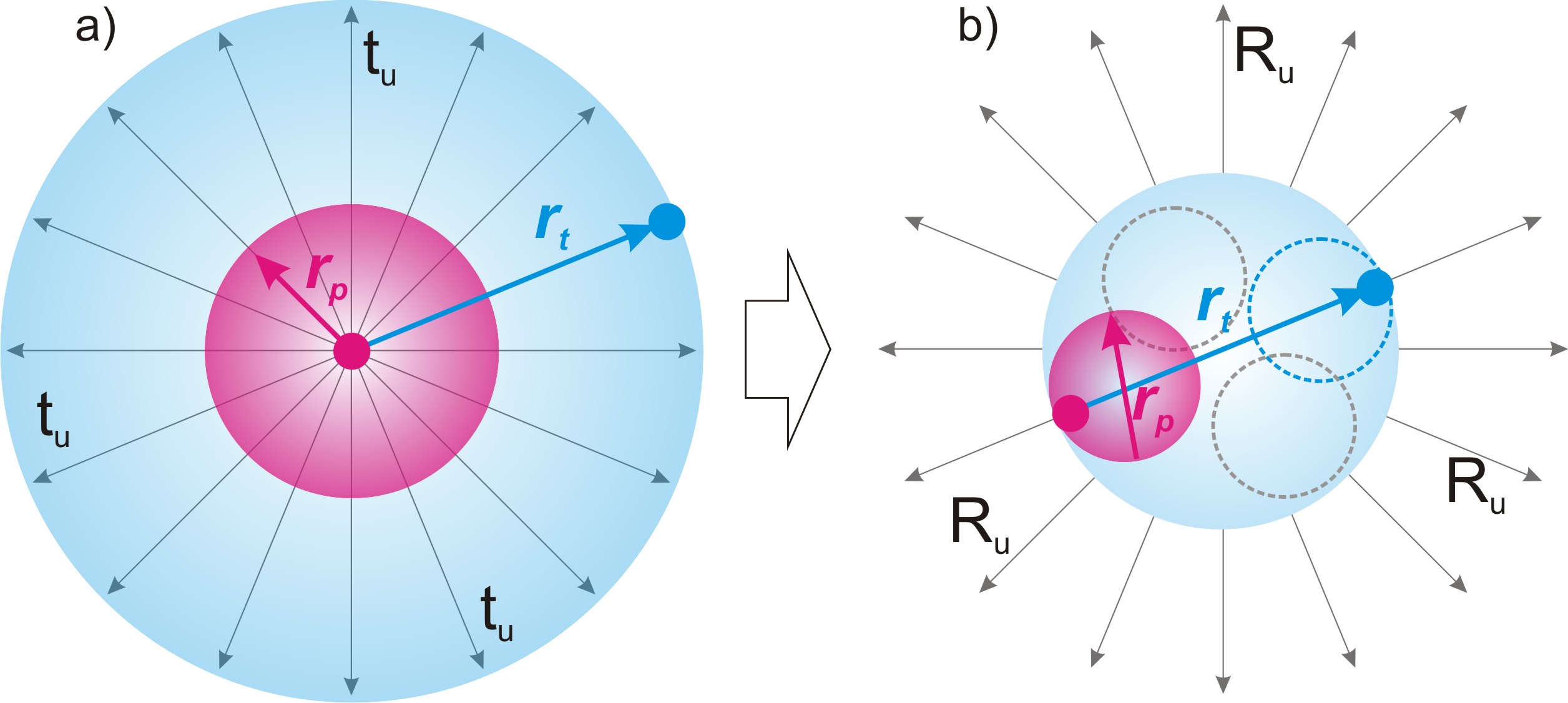
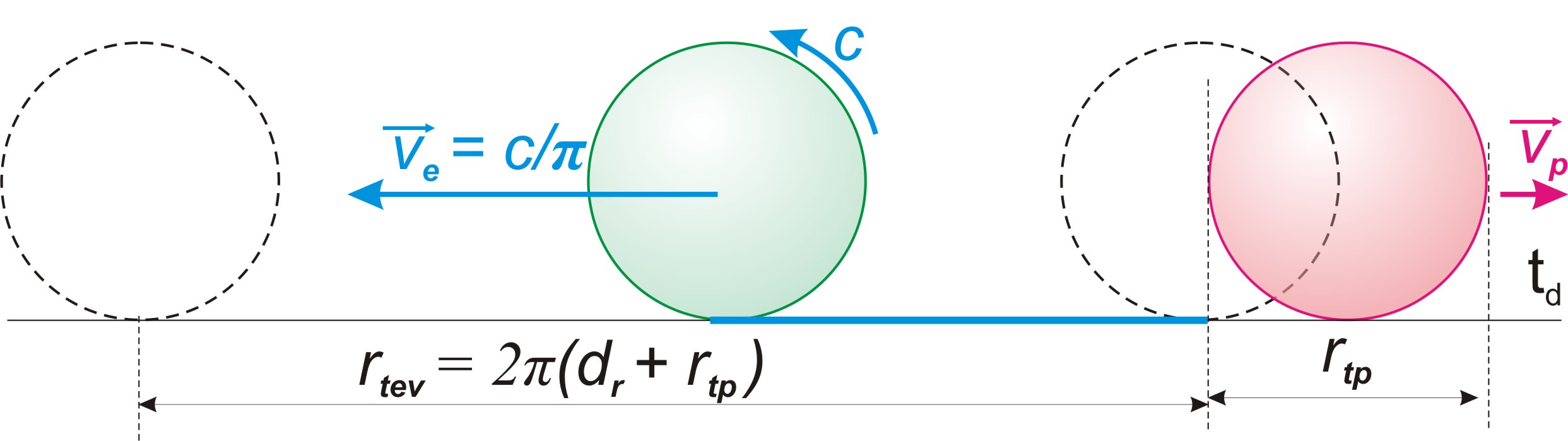
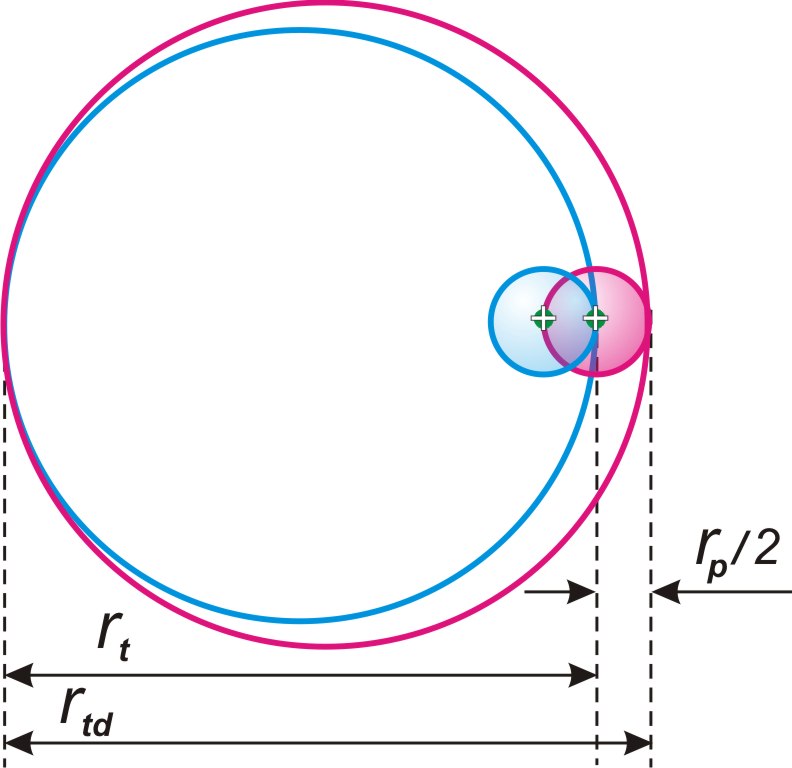
Рис. 10. В локальной системе отсчета становое измерение проецируется однонаправленным вектором относительно каждой местной системы отсчета. Поскольку местная система отсчета, включая все свои потенциальные части внутреннего разделения, движется по становому измерению с одинаковой скоростью c, это измерение не проецируется в нее. Ни одна часть материальной части в местной системе отсчета не может быть смещена относительно другой части по этому измерению, или иметь по нему количественные или качественные соотношения, кроме принципа полной тождественности. Становое измерение не проецируется в местную систему отсчета. Этот вывод необходимо приводит к следующим важным выводам: Время, как последовательность квантов состояния материальной части локализации, в относительности местной системы отсчета не имеет пространственных свойств. Пространство в относительности местной системы отсчета трехмерно и формируется проекцией неопределенного измерения Td потенциальной части локализации и двумя измерениями ее материальной части Это и есть то пространство, которое мы привыкли воспринимать, как физическое. В дальнейшем для удобства будем называть определенное измерение материальной части – определенным измерением физического пространства и обозначим Ru, а неопределенное – неопределенным измерением физического пространства и обозначим Rd. По принципу симметрии вся материальная часть локализации должна проецироваться симметрично относительно каждой из своих выделенных частей, рис. 10, b). Каждая местная система отсчета в собственной относительности находится в центре физического пространства. Все размеры в относительности любой системы отсчета определяются проекцией размера собственного кванта протяженности. Из этого следует вывод: Все относительные сочетания размеров частей локализации проецируются относительно любой местной системы отсчета одинаковым образом. Физическое пространство относительно и зависит от выбора местной системы отсчета. По принципу тождественности двух основных частей локализации (теорема (т2))и внутренней симметрии материальной части (вывод (в2)), размер материальной части по своему определенному измерению Ru равен радиусу Rt ее расширяющейся четырехмерной сферы по становому измерению Tu в кванте состояния nt . Учитывая двумерность материальной части приходим к важным выводам: Относительно каждой местной системы отсчета материальная часть локализации проецируется трехмерной суперпозицией альтернативных положений ее двумерной структуры RuRd, представляющей собой плоский круг, в центре которого находится система отсчета. Физическое пространство проецируется относительно каждой местной системы отсчета трехмерным шаром, в центре которого она находится. Радиус физического пространства Rt определяется размером определенного измерения Ru материальной части локализации, который равен произведению числа пройденных квантов состояния nt на квант протяженности dr. Таким образом, радиус физического пространства определяется по формуле (06): Rt = ntdr = Rnnt/n Радиус физического пространства Rt увеличивается по квантам состояния с максимально возможной скоростью c. Из принципа симметрии физического пространства (вывод (в2)) следует, что размер проекции неопределенного измерения Td потенциальной части локализации в физическое пространство равен размеру его неопределенного измерения Rd. В соответствии с выводами (в17) и (в38)) полный размер неопределенного измерения Rd равен πRt. Размер проекции неопределенного измерения Td потенциальной части локализации в физическое пространство является динамическим и в кванте состояния равен πRt. 8. Элементарные локализации как фундаментальные частицы материи Процесс локализации части внутри материальной части тождественен процессу локализации самой материальной части. Из этого следует, что каждая из n2 частей материальной части образует собственную локализацию, тождественную основной. Для удобства дадим следующие определения: Основной локализацией называется каждая локализация в последовательности локализаций, порожденных случайной флуктуацией. Элементарной локализацией называется локализация каждой из n2 тождественных частей материальной части основной локализации с определяющим числом n. По принципу тождества частей и целого (теорема (т2)) элементарные локализации являются тождественными частями основной локализации. Каждая основная локализация с определяющим числом n состоит из n2 тождественных элементарных локализаций. Определяющее число n основной локализации равно определяющему числу каждой из ее элементарных локализаций. Проекции элементарных локализаций в физическое пространство представляют собой фундаментальные частицы материи. Фундаментальными частицами называются проекции элементарных локализаций в физическое пространство. Все четыре измерения внутреннего пространства элементарной локализации не связаны условиями, определяющими взаимное направление, с измерениями основной локализации и являются относительно них неопределенными. Это условие неопределенности проецируется в физическое пространство. В соответствии с выводом (в19): Внутреннее пространство фундаментальной частицы представляет собой четырехмерный шар с неопределенным внутренним пространством и неопределенным центром относительно измерений физического пространства. По принципу тождества с основной локализацией, элементарная локализация должна состоять из материальной и потенциальной частей. Обозначим: определенное измерение потенциальной части элементарной локализации как tu , а неопределенное как td; определенное измерение ее материальной части как ru, а неопределенное как rd. Материальная часть элементарной локализации должна проецироваться в физическое пространство материальным объектом. Из условия неопределенности, в соответствии с выводом (в11), следует, что этот материальный объект находится в суперпозиции всех своих возможных альтернативных положений внутри фундаментальной частицы. Физическим телом фундаментальной частицы называется проекция материальной части элементарной локализации в физическое пространство. Фундаментальная частица представляет собой в физическом пространстве трехмерную суперпозицию всех возможных альтернативных положений, своего физического тела. Условия проекции физического тела фундаментальной частицы в физическое пространство тождественны условиям проекции всей частицы. При этом условия физического пространства накладываются на условия внутреннего пространства фундаментальной частицы. Из этого вывода в совокупности с выводом (в43) вытекает следующие выводы: Физическое тело фундаментальной частицы представляет собой в физическом пространстве четырехмерный шар с полностью неопределенным внутренним пространством и его центром, находящийся одновременно в условиях проекции внутреннего пространства элементарной локализации и в условиях физического пространства. Физическое тело фундаментальной частицы представляет собой в физическом пространстве трехмерную суперпозицию всех возможных альтернативных положений своего центра. Размер фундаментальной частицы по становому измерению Tu, как и размер всей материальной части по нему, равен кванту протяженности dr. Из принципа разделения на n частей (выводы (в8),(в42))по каждому из двух измерений материальной части, а также вывода (в38) следует вывод: Размер фундаментальной частицы в физическом пространстве определяется ее размером по определенному измерению физического пространства Ru, который в n раз меньше его полного размера Rt. С учетом формулы (06) и вывода (в38): rt = Rt/n = drnt/n (07) , где rt — размер элементарной локализации по определенному измерению Ru материальной части основной локализации в кванте состояния nt. С учетом неопределенности положения физического тела внутри фундаментальной частицы (вывод (в46)) назовем величину rt размером нахождения фундаментальной частицы. Размером нахождения фундаментальной частицы rt называется диаметр шаровидной области, представляющей собой суперпозицию всех возможных альтернативных положений ее физического тела. С другой стороны, из условия тождественности элементарных локализаций основной локализации, следует, что размер определенного измерения tu потенциальной части элементарной локализации должен быть в n раз меньше аналогичного размера Tu основной локализации. То есть должен быть равен тому же размеру rt. Определенное измерение tu потенциальной части элементарной локализации представляет собой радиус внутреннего четырехмерного пространства фундаментальной частицы. При этом размер нахождения фундаментальной частицы rt является ее диаметром в физическом пространстве. Получается, что радиус внутреннего пространства фундаментальной частицы равен ее диаметру во внешнем физическом пространстве. В этом выводе нет противоречия. В соответствии с выводом (в45) внутреннее четырехмерное пространство фундаментальной частицы является неопределенным относительно физического пространства. Единственным условием, определяющим размерные отношения этих пространств, является максимально возможное расстояние между альтернативными положениями физического тела в суперпозиции его положений внутри фундаментальной частицы. Таким образом, четырехмерный шар внутреннего пространства фундаментальной частицы радиуса rt, определяемого полным размером определенного измерения tu потенциальной части элементарной локализации, рис. 12, a), проецируется в физическое пространство по его определенному измерению Ru максимально возможным расстоянием между вариантами положения физического тела внутри фундаментальной частицы. К этому необходимо добавить условие неопределенности центра физического тела (вывод (в46)) , рис. 12, b).
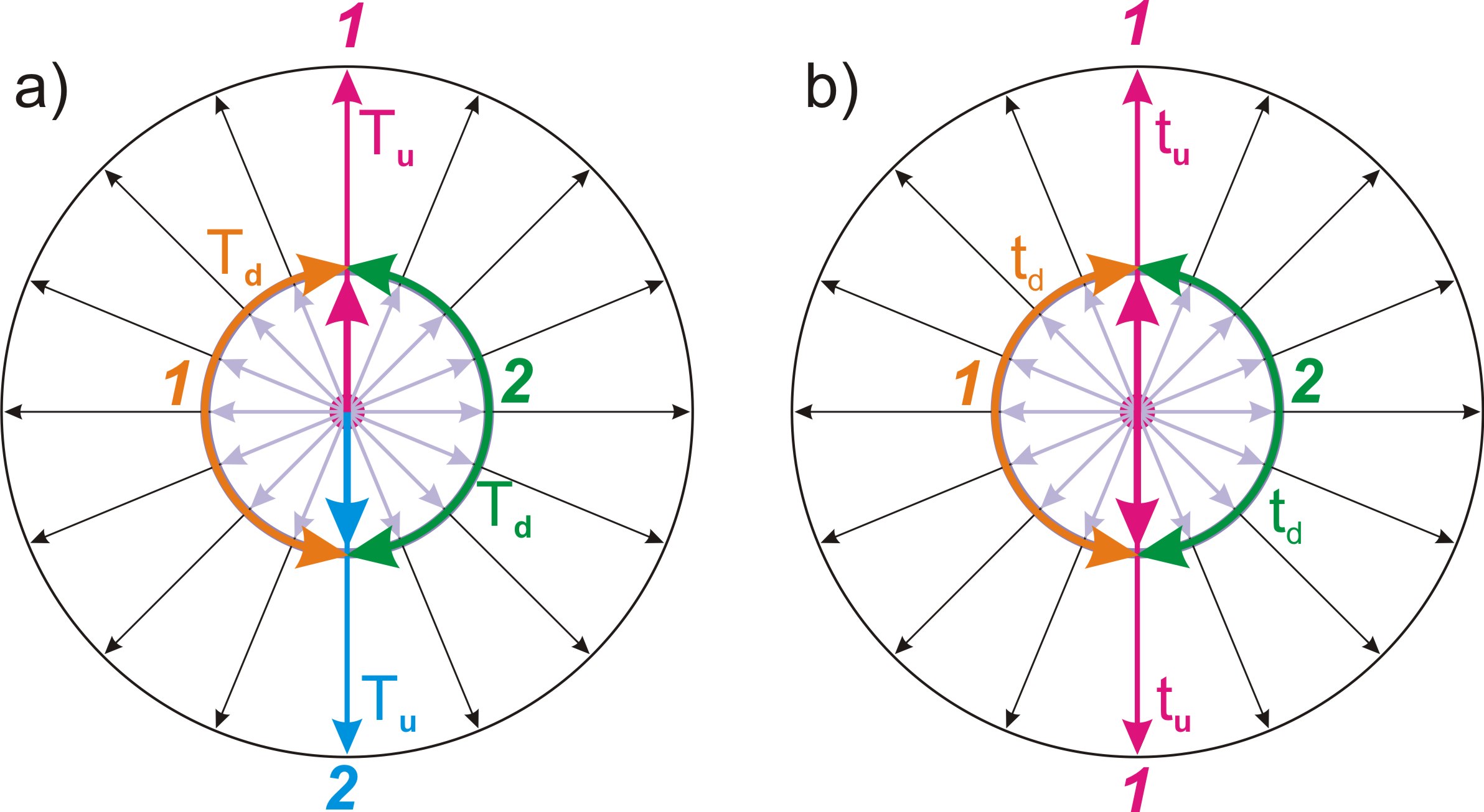
Рис. 12. Радиус внутреннего пространства элементарной локализации rt по определенному измерению tu потенциальной части элементарной локализации проецируется в физическое пространство диаметром фундаментальной частицы по определенному измерению физического пространства Ru. Радиус внутреннего пространства материальной части элементарной локализации rp проецируется в физическое пространство диаметром физического тела фундаментальной частицы. По принципу тождества с основной локализацией, отношение радиуса внутреннего пространства физического тела фундаментальной частицы rp к радиусу ее внутреннего пространства rt, должно быть равно аналогичному отношению радиуса физического пространства Rt к радиусу внутреннего пространства Rn основной локализации. rp/rt = Rt/Rn = nt/n (08), где rp — радиус внутреннего пространства физического тела в кванте состояния nt. С учетом формулы (07) можем записать: Физическое тело фундаментальной частицы в каждом из альтернативных положений внутри своего размера нахождения представляет собой материальное проявление фундаментальной частицы. Таким образом, размер rp мы можем назвать физическим размером. Физическим размером фундаментальной частицы называется диаметр ее физического тела rp по определенному измерению Ru физического пространства. Завершение цикла элементарной локализации происходит вместе с завершением цикла основной локализации в последнем кванте состояния основной локализации при nt = n, когда ее размер rt становится равным dr. Размер полного цикла элементарной локализации равен кванту протяженности dr. 9. Спин фундаментальной частицы В соответствии с выводом (в15) и выводом (в24) цикл восстановления симметрии основной локализации движется одновременно в двух противоположных направлениях по становому измерению Tu. Это движение должно тождественно отражаться на втором неопределенном измерении потенциальной части Td. Из условия неопределенности этого измерения следует, что это движение представляет собой равномерное расширение по нему материальной части одновременно в двух направлениях, рис. 13, a).
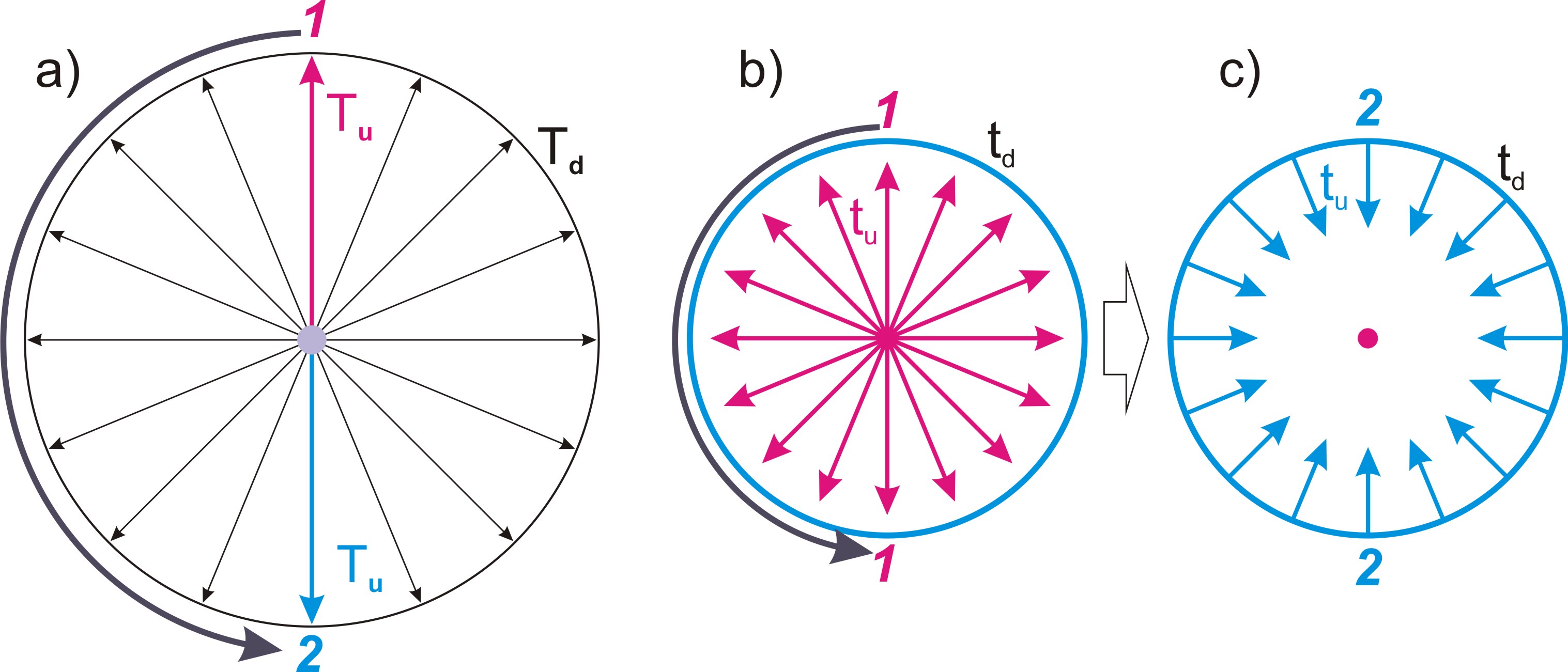
Рис. 13. Таким образом, размер полного цикла материальной части по неопределенному измерению Td равен полуокружности. В соответствии с выводом (в29) местная система отсчета движется по становому измерению Tu в одном направлении. Это условие движения в одном направлении тождественно отражается во внутреннем пространстве фундаментальных частиц, как движение «изнутри - наружу». В результате, их внутреннее пространство формируется двумерной проекцией элементарной локализации не как суперпозицией альтернативных положений двунаправленного диаметра, как в случае с основной локализацией, рис. 13, a), а суперпозицией альтернативных положений однонаправленного радиуса, рис. 13, b). Относительно местной системы отсчета внутреннее пространство элементарной локализации формируется суперпозицией альтернативных положений одного направления определенного измерения, как радиуса, направленного «изнутри - наружу». Положение основной локализации во внешней системе отсчета относительно вращения ее пространства является неопределенным. Следовательно, вариант смещения ее материального тела на полную величину цикла по неопределенному измерению Td является одним из вариантов суперпозиции ее положений. При этом направление станового измерения Tu меняется на противоположное, рис. 14, a).
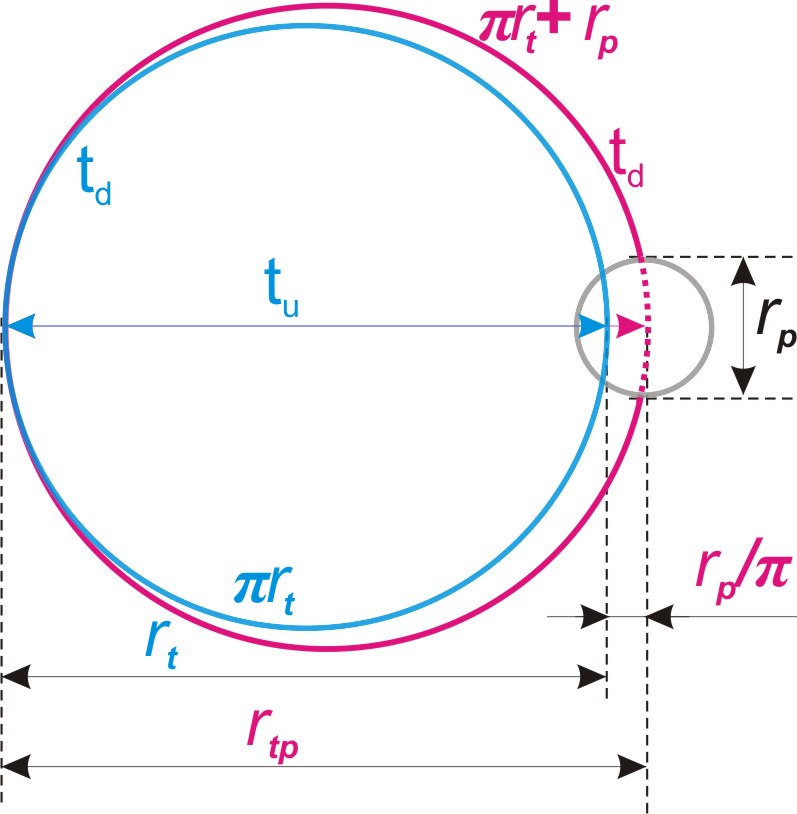
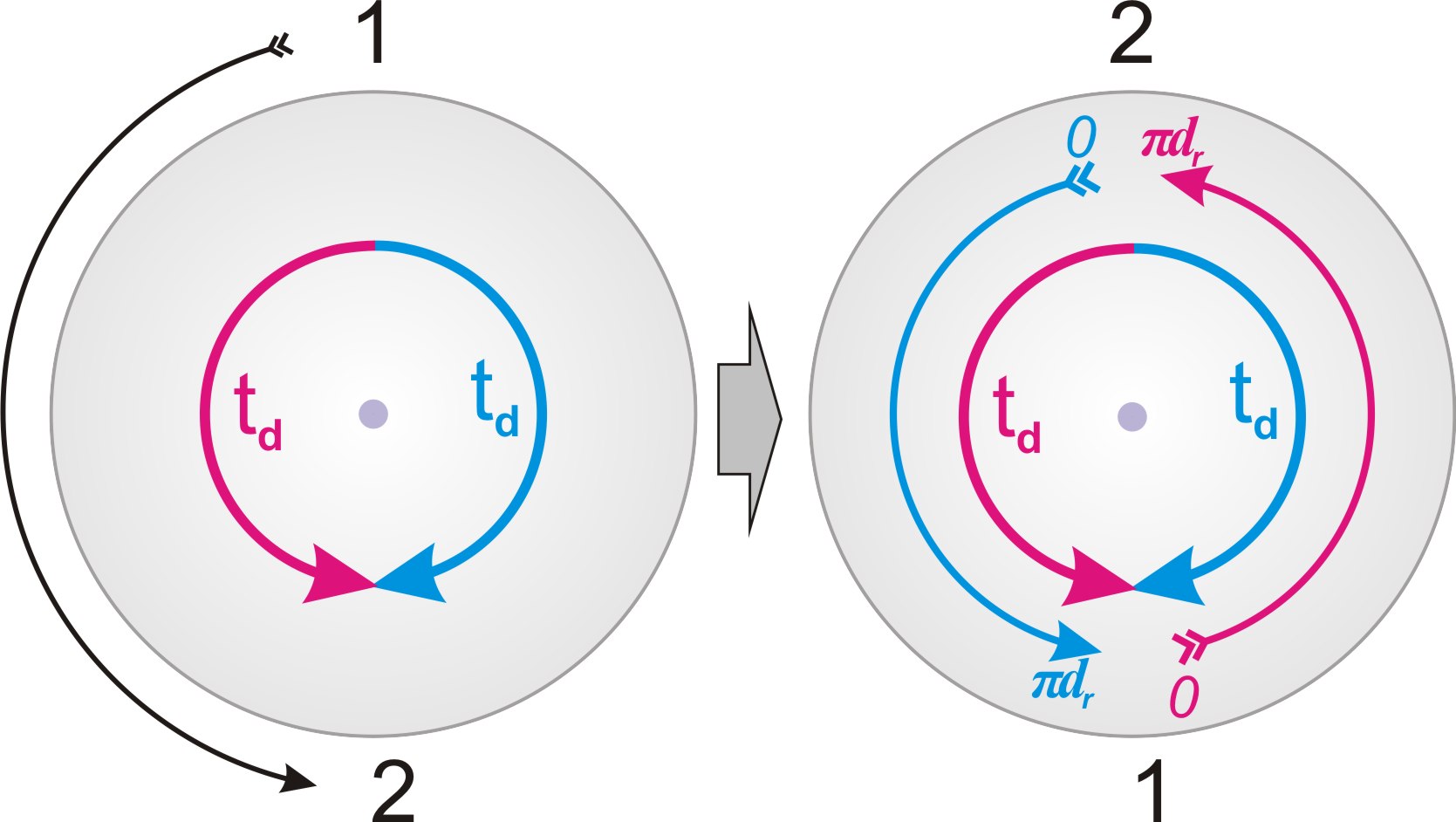
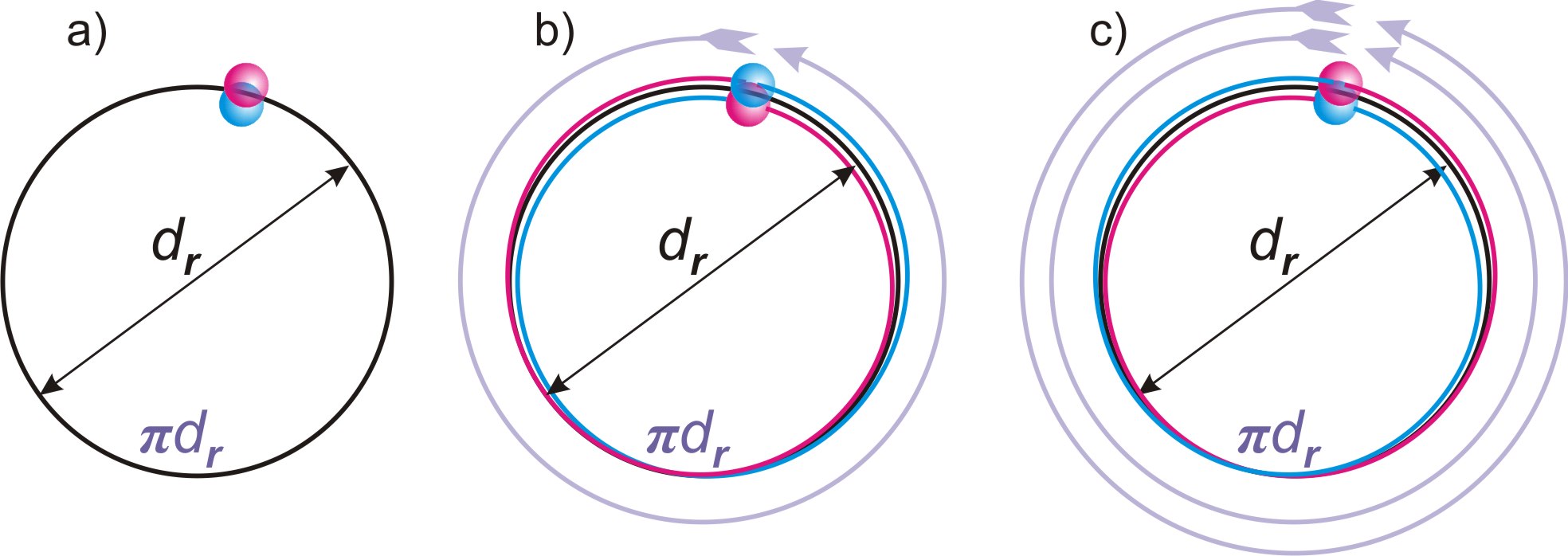
Рис. 14. По существу, в отношении основной локализации это статичное условие, которое ничего не меняет в ее состоянии. В отношении фундаментальной частицы, направление проекции определенного измерения tu которой имеет одно направление – «изнутри - наружу», рис. 14, b) такое смещение на полный цикл по проекции неопределенного измерения td в местной системе отсчета приводит к смене этого направления на противоположное – «снаружи – внутрь», рис. 14, c). В результате смещения фундаментальной частицы на полный цикл по проекции неопределенного измерения td потенциальной части элементарной локализации, происходит смена направления проекции определенного измерения tu на противоположное. В соответствии с выводом (в48) внутренний радиус элементарной локализации проецируется в физическое пространство диаметром фундаментальной частицы. Соответственно полный размер πdr неопределенного измерения td потенциальной части элементарной локализации, представляющий собой в ее внутреннем пространстве полуокружность, рис 15, a), проецируется в физическое пространство размером πdr полной окружности. А два направления по неопределенному измерению td – двумя направлениями обхода по ней, рис. 15, b).
Рис. 15. Это следует из того, что отношение размеров определенного tu и неопределенного td измерений при проекции в физическое пространство не должно меняться. С другой стороны, замыкающая сфера внутреннего пространства фундаментальной частицы в соответствии с определением (о3) не должна иметь внешней стороны, то есть, представлять собой «ленту Мебиуса». Таким образом, полный цикл перехода физического тела фундаментальной частицы, рис. 17, a), по проекции ее внутреннего неопределенного измерения td представляет собой в физическом пространстве полный переворот на 360o относительно области своего нахождения, в результате чего направление проекции внутреннего определенного измерения tu меняется на противоположное, рис. 16, b).
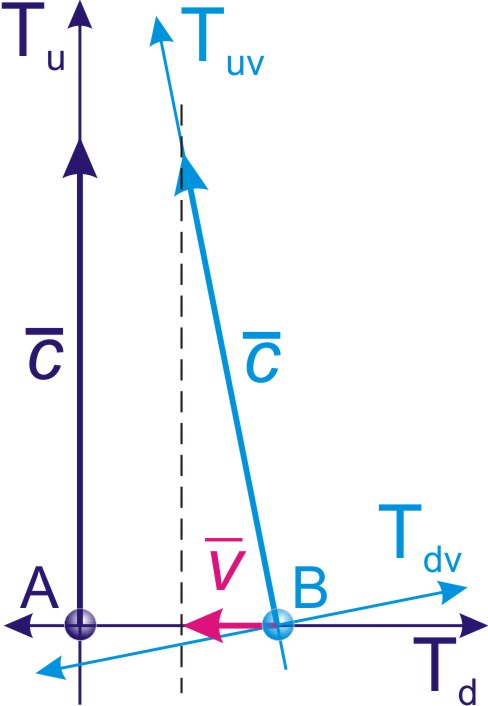
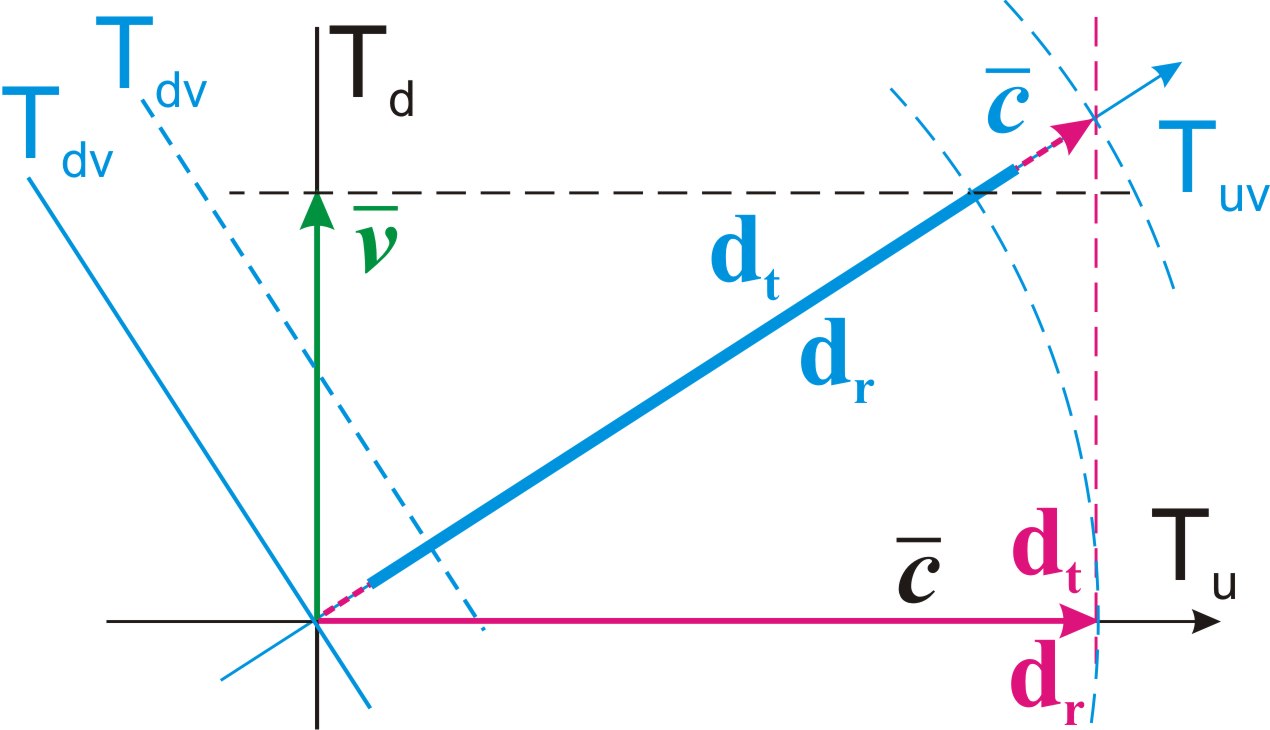
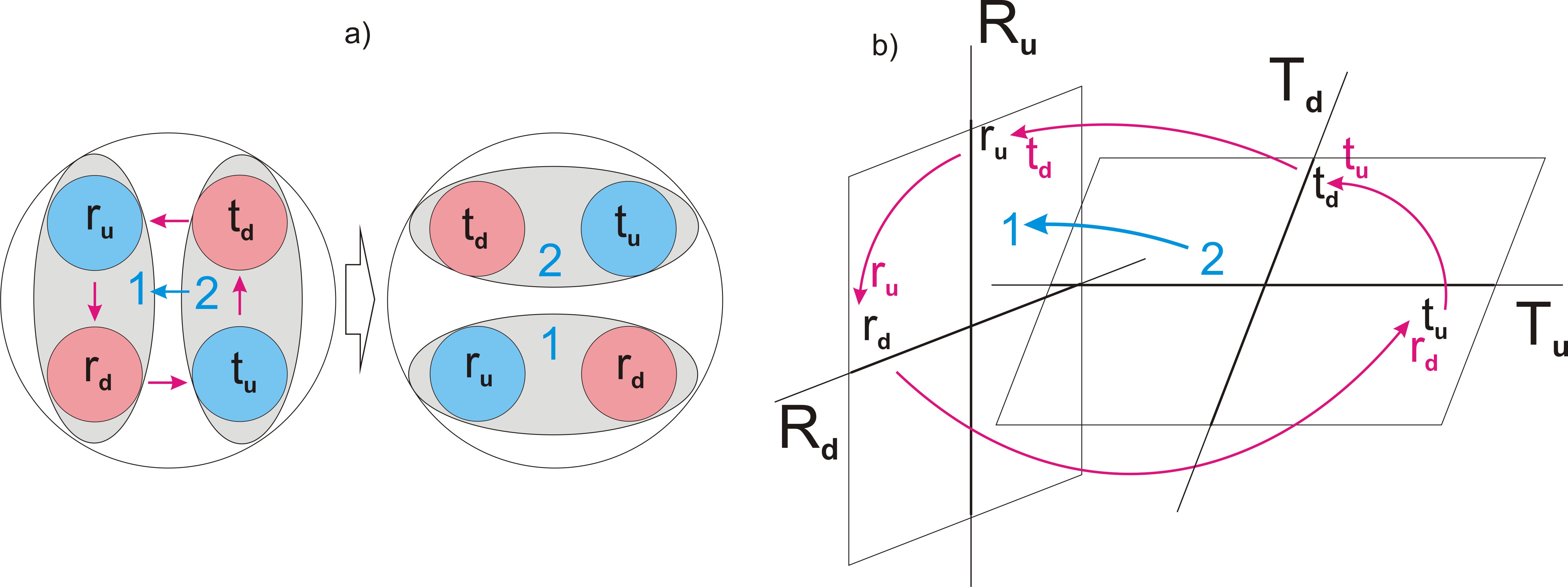
Рис. 16. Для возвращения фундаментальной частицы в исходное состояние потребуется еще один полный цикл перехода по проекции неопределенного измерения td, соответствующий второму перевороту на 360o, рис. 16, c). Это соответствует принятому в квантовой механике понятию спина, равного 1/2. Спин фундаментальной частицы равен 1/2. 10. Движение в физическом пространстве В относительности каждой местной системы отсчета нарушение симметрии одной из фундаментальных частиц относительно другой, вызывает цикл восстановления симметрии, который заставляет их двигаться навстречу друг другу. Этот вопрос мы разберем в главе «Гравитация», а сейчас для нас важно то, что частицы начинают смещаться друг относительно друга. Это смещение происходит при переходе из одного кванта состояния в другой. Как тождественная часть материальной части локализации, каждая фундаментальная частица в своей собственной относительности движется по становому измерению Tu с постоянной скоростью c = dr/dt. Вывод (в54): Любая местная система отсчета, связанная с любой из фундаментальных частиц, или их группой, движется по становому измерению с максимально возможной скоростью c. Последовательность квантов состояния материальной части смещается по двумерной структуре TuTd потенциальной части. Из этого следует, что любое движение фундаментальных частиц, как частей материальной части, возможно только по этой двумерной структуре. Но если учесть то, что с одной стороны, движение по становому измерению Tu происходит всегда с одинаковой скоростью, а с другой, в физическом пространстве отражается только одно из измерений этой двумерной структуры – неопределенное Td, необходимо следует вывод: Любое движение материальных объектов в физическом пространстве осуществляется по неопределенному измерению Td двумерной структуры потенциальной части. В соответствии с этим выводом для удобства дальнейших рассуждений дадим соответствующее название этому измерению: Мобильным измерением называется неопределенное измерение Td двумерной структуры потенциальной части. Условия локализации, определяющие скорость смещения материальной части по двумерной структуре TuTd потенциальной части, никаким образом не ограничивают спектр возможных направлений этого процесса. В результате наложения условий местного цикла восстановления симметрии на основной цикл изменяется направление станового измерения Tu в отношении той или иной частицы. Направление вектора станового измерения Tu в относительности двух фундаментальных частиц, движущихся друг относительно друга, различается. Как следствие этой разницы в направлении вектора станового измерения Tu в системе отсчета, связанной с одной частицей, возникает его проекция на мобильное измерение Td в относительности другой частицы, рис. 17.
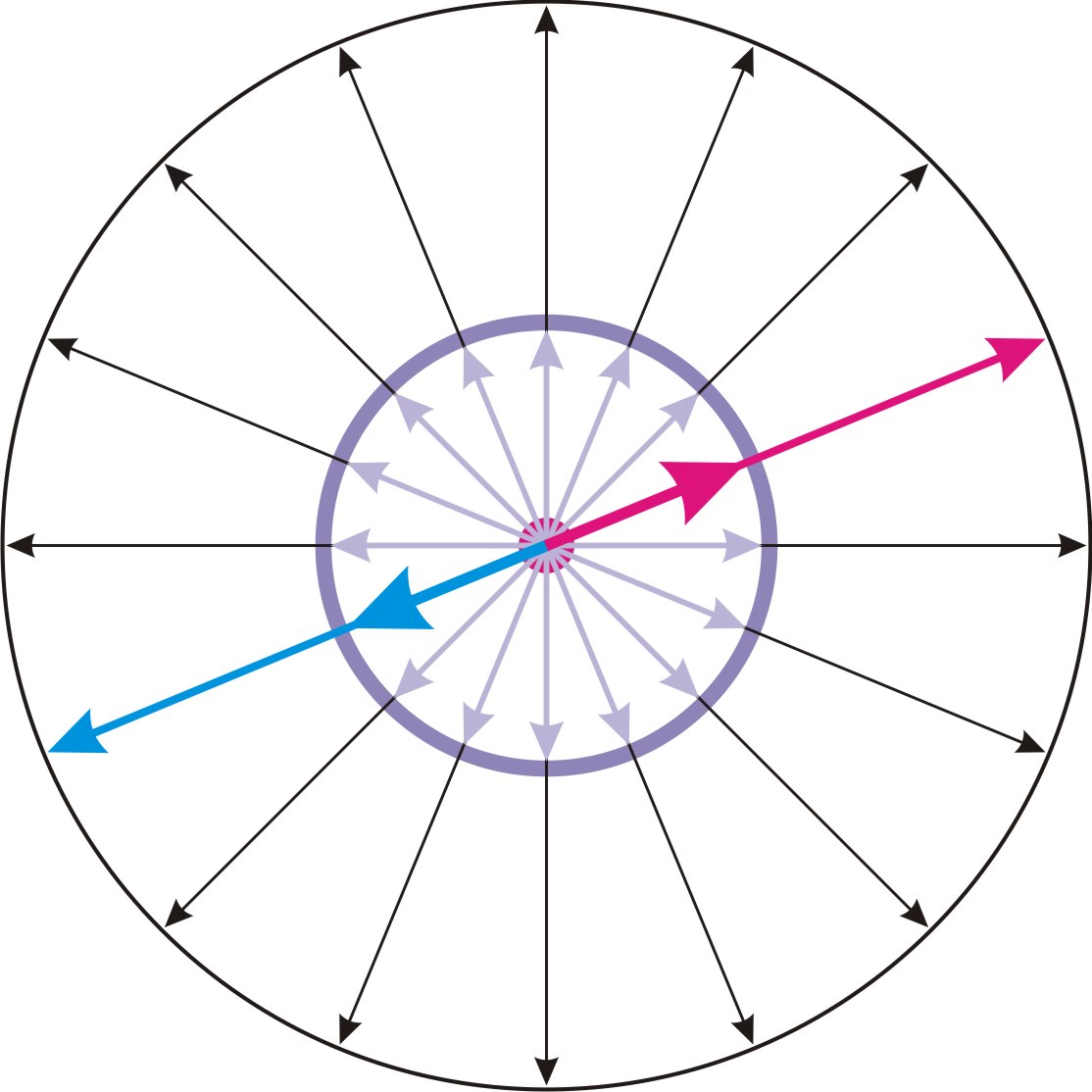
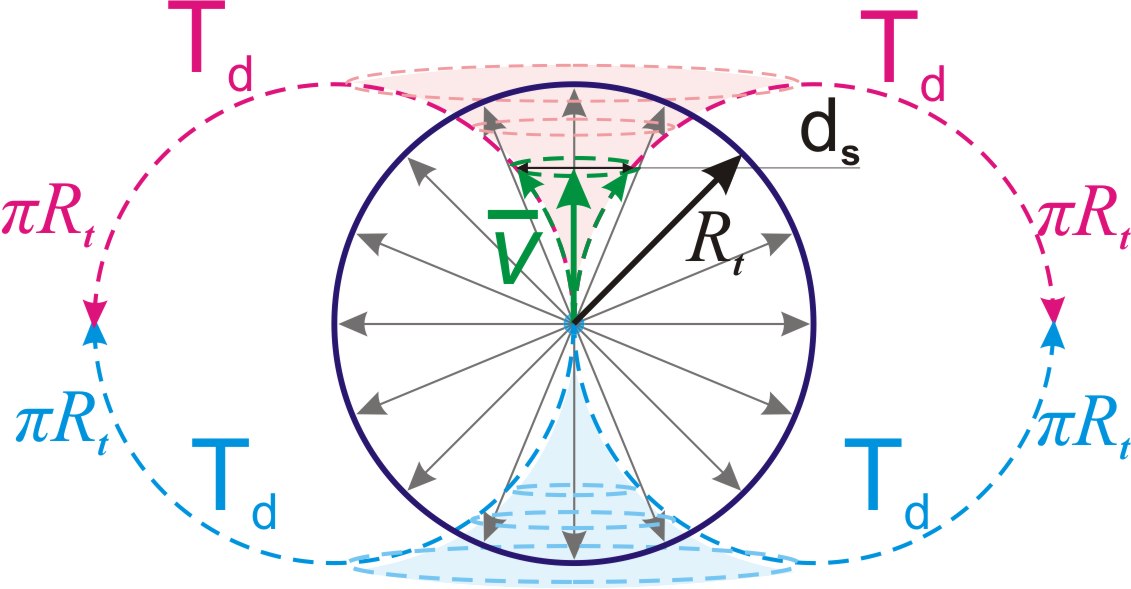
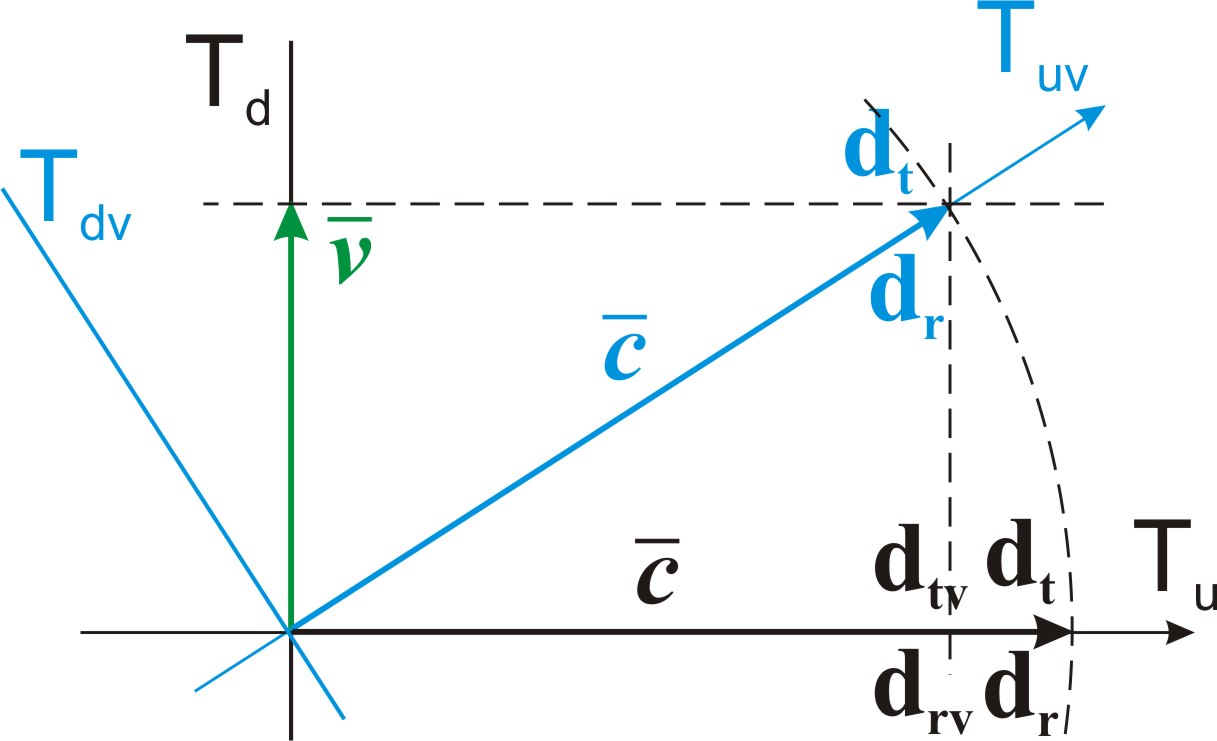
Рис. 17. На рисунке 17 показана движущаяся система отсчета TuvTdv со скоростью v, относительно системы отсчета TuTd. Вектор движения по становому измерению Tu системы отсчета TuvTdv проецируется на мобильное измерение Td системы отсчета TuTd вектором движения со скоростью v, относительно нее. Движение материальных тел в физическом пространстве представляет собой проекцию их движения по собственному вектору станового измерения Tu на мобильное измерение Td системы отсчета. Таким образом, на условие неопределенности мобильного измерения Td в относительности каждого движущегося физического объекта накладывается условие направления, определяемое вектором его движения. Направление мобильного измерения Td местной системы отсчета определяется относительно каждого движущегося материального объекта вектором его движения. Совмещение альтернативных условий определенного измерения физического пространства Ru, определяющего его размер, и мобильного измерения Td, по которому осуществляется движение в нем, создает область пространственной неопределенности диаметра ds, в которой совмещаются условия полного размера Rt определенного измерения Ru и размера πRt неопределенного измерения Td, рис. 18.
Рис. 18. При приближении к центру системы отсчета отклонение неопределенного измерения Td от определенного измерения Ru физического пространства стремится к нулю. Чем дальше от центра системы отсчета, тем больше диаметр ds области неопределенности. При приближении к границе физического пространства, ds стремится к максимальному размеру πRt . Из этого необходимо следует вывод, что понятие движения по прямой линии для физических тел является математической абстракцией, не существующей в реальном физическом пространстве (к движению квантов света это не относится, что будет показано в соответствующей главе). Наша планета Земля находится в центре Вселенной в относительности всех, связанных с нею систем отсчета. При этом космическое пространство вместе с космическими объектами по мере удаления от Земли становится всё более неопределенным в отношении пространственных, а, следовательно, и физических свойств, а дальние космические тела проецируются увеличенным размером за счет увеличения неопределенности своего положения. Если перемещаться (например, на космическом корабле) из одной местной системы отсчета в другую, геометрия Вселенной будет меняться. Из этого следует, что все физические вычисления относительно дальнего космоса, основанные на экстраполяции геометрии околоземного пространства и неизменности вектора времени на дальние расстояния, несут в себе ошибку, тем большую, чем более удаленна рассматриваемая область космоса. Мобильное измерение Td относительно покоящейся частицы в местной системе отсчета является неопределенным, то есть, находится в суперпозиции всех альтернативных положений, определяемых условием перпендикулярности другим измерениям физического пространства Ru и Rd. Из этого следует вывод: Размер проекции фундаментальной частицы на мобильное измерение Td равен ее размеру rt по определенному измерению Ru физического пространства. Поскольку относительно движущейся частицы мобильное измерение Td проецируется вектором ее движения, два других измерения физического пространства Ru и Rd проецируются плоскостью, перпендикулярной вектору движения, рис. 19, a), а область ее нахождения представляет собой цилиндр, рис. 19, b).
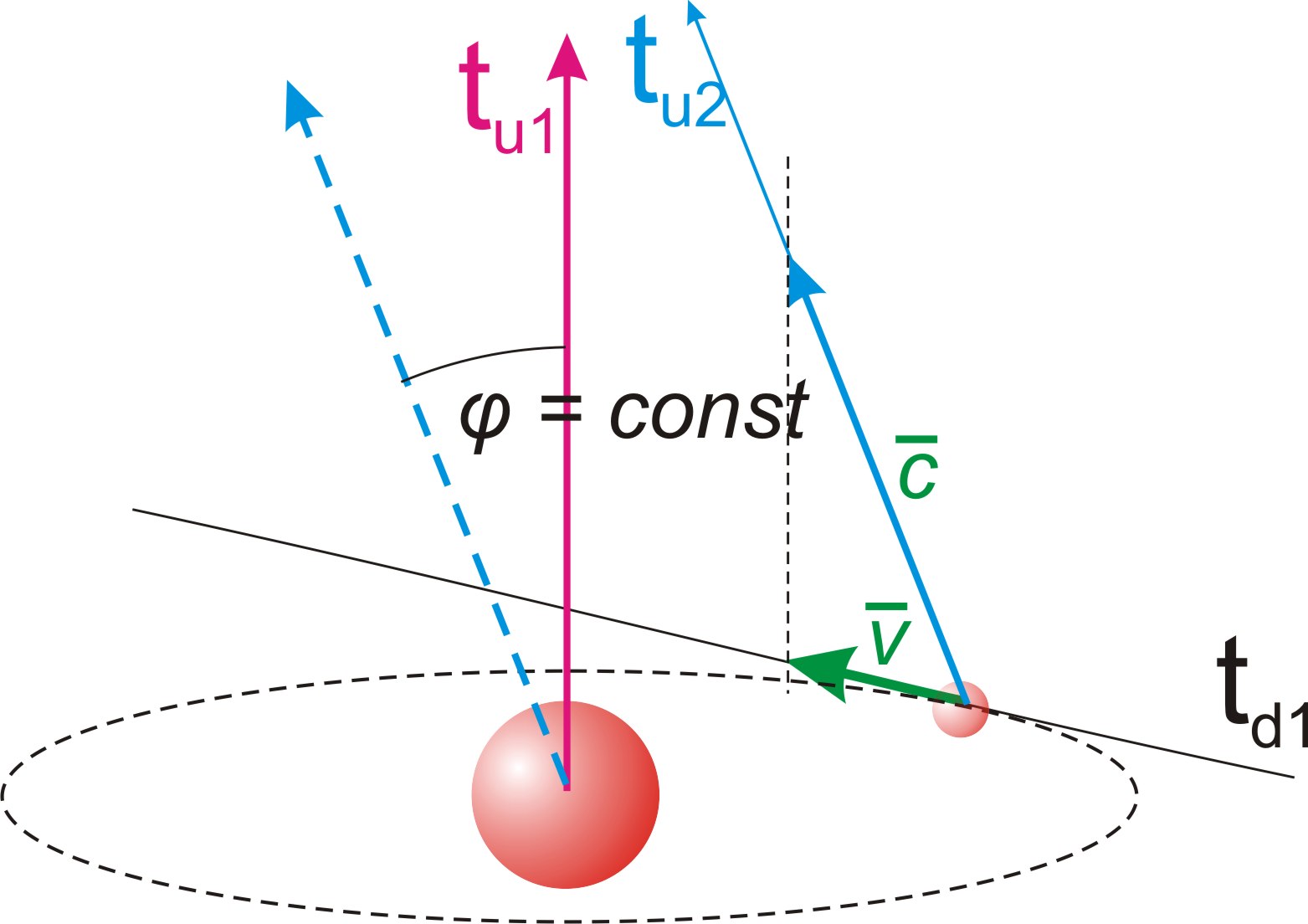
Рис. 19. Область нахождения движущейся фундаментальной частицы в физическом пространстве представляет собой цилиндр, ориентированный по вектору движения, диаметр и длина которого равны размеру ее нахождения rt. 11. Инерциальное движение и форма галактик Материальная часть всегда находится в центре локализации и в каждом кванте состояния набирает скорость смещения по становому измерению только относительно самой себя. Учитывая отсутствие каких-либо точек отсчета в Беспредельности, эта набранная скорость в кванте состояния ни с чем не соотносится, кроме самого кванта состояния, и в каждом последующем шаге процесс набора скорости для перехода в следующее состояние повторяется заново. Процесс набора скорости материальной частью в кванте состояния тождественно повторяется в следующем кванте состояния. Таким образом, в каждом кванте состояния сила цикла придает материальной части ускорение: Материальная часть локализации движется по становому измерению с одинаковой скоростью c = dr/dt и одинаковым ускорением в каждом кванте состояния a0 = dr/dt2. Каждая фундаментальная частица в собственной относительности движется по становому измерению Tu с максимально возможной скоростью c (вывод (в54)). Направление вектора этого движения определяется состоянием нарушенной симметрии относительно каждой частицы. При отсутствии воздействий, изменяющих состояние симметрии, направление вектора движения фундаментальной частицы по становому измерению Tu неизменно. Соответственно неизменна и проекция этого движения в местную систему отсчета. Это означает, что при неизменности состояния симметрии, скорость движения частицы относительно местной системы отсчета сохраняется. Таким образом, мы нашли причину, определяющую инерцию движения в физическом пространстве. Дадим следующие определения: Инерциальным движением или инерцией называется движение в условиях сохранения собственного относительного направления вектора станового измерения. Инерциальной системой отсчета называется местная система отсчета, связанная с одной или группой фундаментальных частиц, движущихся по инерции. Далее для удобства при упоминании местной системы отсчета будем считать, что имеется в виду инерциальная система отсчета. Однако, в отличие от классической физики, где инерциальным считается прямолинейное равномерное движение, из данной теории следует, что инерциальными являются только движения космических тел по круговым орбитам. В этом случае угол φ между становым измерением системы отсчета, связанной с центром масс обоих космических тел и становым измерением каждого из космических тел остается неизменным, рис. 20.
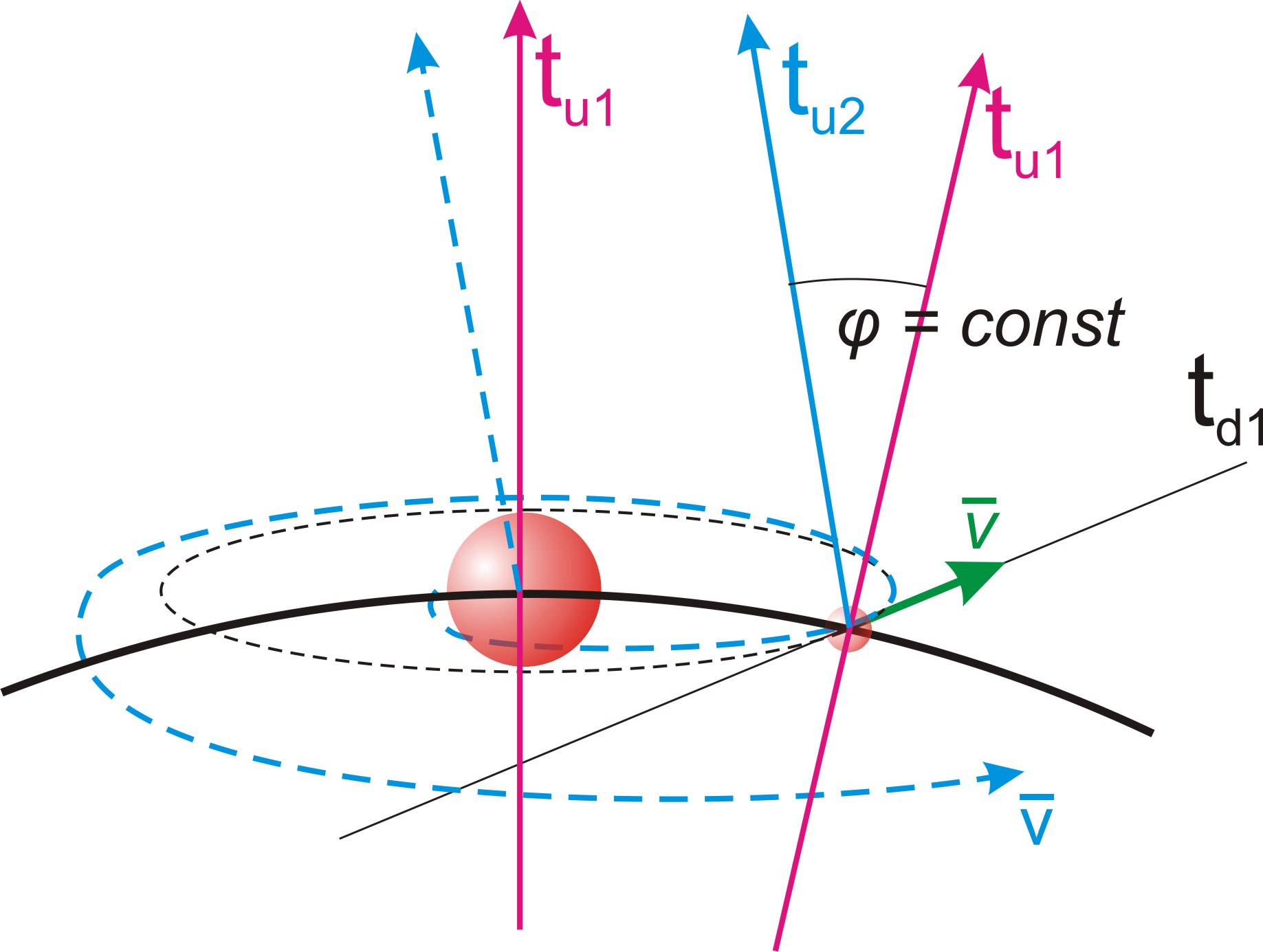
Рис. 20. Но такое круговое инерциальное движение космических тел возможно только при условии незначительного радиуса орбиты в сравнении с размером Вселенной, при котором вектор станового измерения сохраняет свое направление на удаленных друг от друга сторонах орбиты. На больших расстояниях от сверхмассивных тел это движение будет иметь форму, напоминающую расходящейся спираль, что мы и наблюдаем в форме галактик, рис. 21.
Рис. 21. Таким образом, это одно из достаточно весомых подтверждений данной теории. Инерциальное движение на галактических расстояниях представляет собой расходящуюся спираль, величина расхождения которой на малых расстояниях, сравнимых со звездными системами, стремится к нулю, в результате чего, инерциальное движение планет происходит по круговым орбитам. К этому выводу мы вынуждены добавить еще один важный вывод: Принцип инерциальности равномерного прямолинейного движения в приложении к космическим масштабам является системной ошибкой классической физики. Если какое-либо воздействие на элементарную частицу приводит к изменению ее относительного направления станового измерения Tu, это измененное состояние по принципу инерции (вывод (в63)) сохраняется после прекращения воздействия. Скорость движения элементарных частиц в физическом пространстве, придаваемая каким-либо воздействием в кванте состояния, прибавляется к уже имеющейся скорости и сохраняется после прекращения воздействия. Таким образом, если некое взаимодействие частиц придает любой из них в кванте состояния ускорение a движения по мобильному измерению Td, ее движение становится равноускоренным: v = anidt (11), где ni – количество квантов состояния, в которых действовало ускорение. nidt = t (12), где t – время действия ускорения. Соответственно: 12. Квант состояния физического процесса Любой физический процесс представляет собой взаимодействие проекций элементарных локализаций в физическое пространство, движение в котором (вывод (в55)) осуществляется по мобильному измерению. При этом скорость взаимодействия не может превышать максимально возможную скорость c. Из этого следует, что проекция движения одной фундаментальной частицы в систему отсчета, связанную с другой фундаментальной частицей отразится в ней не быстрее, чем через промежуток времени, равный отношению расстояния между ними к скорости c. Изменение в состоянии одной фундаментальной частицы может отразиться на состоянии другой фундаментальной частицы не быстрее, чем через промежуток времени, равный отношению расстояния между ними к скорости c. Это отношение представляет собой минимальный отрезок времени или квант протяженности процесса взаимодействия двух частиц. Размером физического процесса называется максимальное расстояние между его частями в физическом пространстве. Квантом протяженности физического процесса называется отношение его размера к максимально возможной скорости c. dtr = Rf/c = Rfdt/dr (14), где dtr – размер кванта протяженности физического процесса по становому измерению Tu в единицах времени, Rf – пространственный размер физического процесса. В пределах процесса, определяемого квантом протяженности, взаимоотношение частей этого процесса является неопределенным. Квантом состояния физического процесса называется его минимальное неделимое состояние в последовательности состояний, при котором, каждая из частей этого процесса отражается в каждой другой его части. Таким образом, размер кванта состояния процесса в физическом пространстве равен его размеру Rf, а в проекции на становое измерение его размер равен размеру его кванта протяженности dtr. В пределах кванта состояния процесса его части находятся в неопределенности друг относительно друга. В кванте состояния физического процесса его части представляют собой суперпозицию всех возможных альтернативных сочетаний. Каждый квант состояния процесса представляет собой реализованный акт взаимоотношений всех частей этого процесса. При переходе физического процесса по квантам состояния, в каждом предыдущем кванте состояния происходит редукция суперпозиции альтернативных сочетаний всех частей процесса к одному реализованному варианту. Если местная система отсчета связана с определенным физическим процессом или телом, то она должна отражать квант состояния процесса (тела) как квант собственного состояния системы отсчета. Квантом состояния местной системы отсчета называется целостное одномоментное состояние системы отсчета, соответствующее кванту состояния физического процесса или тела, с которым эта система отсчета связана. Последовательность событий и физических процессов в местной системе отсчета в пределах ее собственного кванта состояния является неопределенной и представляет собой суперпозицию всех возможных альтернативных вариантов. Из выводов, сделанных в данной главе, следует еще один важный вывод: Любое сравнение процессов, расположенных в пространстве на расстоянии R, корректно только относительно системы отсчета, размер которой больше чем R, а размер кванта состояния по становому измерению в единицах времени больше, чем R/c. Неопределенность событий, разделенных расстоянием R и временем меньшим, чем R/c, в ТО называется относительностью одновременности. Однако этот вывод об относительности одновременности полностью игнорируется при утверждении о замедлении течения времени в движущейся системе отсчета относительно покоящейся, что приводит к концептуальной ошибке. На рис. 22 представлена покоящаяся система отсчета tutd. И система отсчета tuvtdv, движущимся со скоростью v относительно системы tutd.
Рис. 22. Размер кванта протяженности drv движущейся системы отсчета сокращается в проекции на становое измерение покоящейся системы. Из тождественности треугольников находим: drv/dr = dtv/dt = Интерпретация сокращения размера кванта протяженности dtv движущейся системы отсчета относительно кванта протяженности покоящейся dt в единицах времени, является ошибочной. В соответствии с выводом (в70) все процессы в пределах размера кванта протяженности dt по становому измерению являются неопределенными. Из этого следует, что границы кванта протяженности dtv движущейся системы отсчета являются неопределенными в относительности кванта протяженности dt покоящейся системы отсчета, рис. 23.
Рис. 23. С другой стороны, в относительности любой местной системы отсчета все материальные объекты, проецирующиеся в нее, независимо от относительных скоростей своего движения, переходят вместе с ней из одного кванта состояния в другой по последовательности времени и не могут опередить или отстать от этого процесса. В относительности местной системы отсчета смещение в кванте состояния одинаково для всех частей материальной части локализации, независимо от их скоростей движения, и равно dr. С учетом неопределенности процессов в пределах кванта протяженности приходим к выводу: Квант протяженности покоящейся системы отсчета включает в себя кванты протяженности всех движущихся систем отсчета, как суперпозицию всех возможных их альтернативных положений относительно своего размера. Время, как последовательность квантов состояния, течет одинаково для всех материальных объектов в относительности любой местной системы отсчета, независимо от скорости их движения. В соответствии с выводом (в47) размер фундаментальной частицы в физическом пространстве определяется ее размером по определенному измерению Ru физического пространства, который проецируется из кванта протяженности (формула (07)). rt = Rt/n = drnt/n Таким образом, относительно покоящейся системы отсчета размер движущейся фундаментальной частицы сокращается: rtv = ntdrv/n = ntdr Размер движущейся фундаментальной частицы относительно местной системы отсчета со скоростью v сокращается относительно размера покоящейся частицы пропорционально Обратим внимание на то, что размер кванта состояния системы отсчета, связанной с планетой Земля, равен отношению ее диаметра к скорости c. Это отношение в точности равно минимальному отрезку времени восприятия человеком последовательных стадий движения наблюдаемых им объектов (24 кадра в секунду). Если к этому учесть тот факт, что интервал снятия показаний экспериментатором с любого физического прибора не может быть меньше размера этого кванта состояния в единицах времени, можно придти к интересным выводам, но эта тема выходит за рамки данного исследования. По традиции механики, воздействие, придающее ускорение, называется силой, а материальная характеристика физического тела, обратно пропорционально которой сила придает ему ускорение – массой. В соответствии с выводом (в44) область физического пространства, определяемая размером нахождения фундаментальной частицы, представляет собой равномерно заполненное материей пространство. Таким образом, размер нахождения частицы является ее единственной материальной характеристикой. Согласно нашей теоретической модели все силы определяются воздействием циклов восстановления симметрии. Относительно локальной системы отсчета величина нарушения симметрии в основной локализации определяется отношением размера ее материальной части к размеру потенциальной части. По становому измерению Tu отношение его полного размера Rn к размеру материальной части по нему dr равно n. В соответствии с формулой (05): Эта же величина нарушения симметрии по становому измерению относится и к фундаментальным частицам, так как они имеют такой же размер по нему dr, как и вся материальная часть основной локализации. Причем этот размер в соответствии с выводами (в73) и (в74) не зависит от скорости движения частицы. По мобильному измерению Td материальная часть основной локализации не выделена и занимает весь его размер πRt в каждом кванте состояния nt. В соответствии с выводом (в40) нарушение симметрии фундаментальными частицами по нему следует считать относительно этого размера. В соответствии с выводами (в8) и (в42), элементарная локализация должна быть в n раз меньше материальной части по обоим ее измерениям Ru и Rd. Таким образом, фундаментальная частица выделяется по неопределенному измерению Rd материальной части размером πrt, что тождественно отражается аналогичным размером πrt выделения по второму неопределенному измерению физического пространства – мобильному измерению Td. Это не противоречит выводу (в59), согласно которого фундаментальная частица проецируется в физическом пространстве на мобильное измерение размером rt, рис. 24, a).
Рис. 24. Мобильное измерение Td проецируется относительно элементарной локализации неопределенным измерением td ее потенциальной части, а оно, в свою очередь, проецируется в физическое пространство размером πrt, рис. 24, b). Но в соответствии с выводом (в75) этот размер πrt относительно локальной системы отсчета, связанной с материальной частью основной локализации, будет иметь только та фундаментальная частица, скорость движения которой по мобильному измерению Td относительно локальной системы отсчета равна нулю. Дадим следующие определения: Идеальной системой отсчета называется местная система отсчета, скорость движения которой по мобильному измерению Td относительно локальной системы отсчета равна нулю. Состоянием покоя называется состояние фундаментальной частицы, скорость движения которой относительно идеальной системы отсчета равна нулю. Таким образом, фундаментальная частица в состоянии покоя выделена по каждому из измерений потенциальной части с коэффициентом n. Дадим следующие определения: Определенностью по измерению называется отношение размера протяженности измерения в идеальной системе отсчета, относительно которого выделена фундаментальная частица, к размеру ее выделения по этому измерению. Материальной определенностью фундаментальной частицы называется произведение ее определенности по каждому из измерений двумерной структуры TuTd потенциальной части локализации. Определенность по становому измерению Tu следует считать относительно его полного размера Rn, а определенность по мобильному измерению Td следует считать относительно его размера πRt в кванте состояния nt. Таким образом, если мы определим материальную определенность, как массу: Массой фундаментальной частицы называется ее материальная определенность, выраженная в единицах массы. m = ku (21), где m – масса фундаментальной частицы, u – материальная определенность, k – коэффициент системы мер, мы придем к традиционной формуле механики: Для фундаментальной частицы в состоянии покоя можем записать: un = n2 (23), где un – материальная определенность фундаментальной частицы в состоянии покоя. Примем массу фундаментальной частицы в состоянии покоя за единицу массы и обозначим dm. k = dm /n2 (25) Таким образом, масса фундаментальной частицы не зависит от стадии цикла восстановления симметрии, определяемой количеством пройденных квантов состояния. Это же относится к массе любых физических тел, состоящей из фундаментальных частиц и их тождественных частей (проекций). Масса как материальная характеристика выделенных частей в локализации не зависит от стадии основного цикла и количества пройденных квантов состояния. Сокращение относительного размера движущейся фундаментальной частицы (вывод (в75)) относительно идеальной системы отсчета приводит к увеличению ее определенности по мобильному измерению Td. Учитывая эти условия, можем записать: uni = unrt/rtv (26), где uni – материальная определенность движущейся фундаментальной частицы. В соответствии с формулой (19): uni = unrt/rtv = un/ mnv = dm/ Эта формула справедлива для любого физического тела состоящего из фундаментальных частиц, их частей и тождественных проекций. mv = m0/ Масса физического тела при его движении по мобильному измерению Td относительно локальной системы отсчета увеличивается пропорционально 1/ В отличие от сокращения размера, это увеличение массы движущейся фундаментальной частицы в определенном смысле абсолютно и не зависит от выбора системы отсчета. Таким образом, в отношении изменения размера и массы движущегося тела, наша модель полностью согласуется с принятыми в физике формулами релятивистского движения. Учитывая движение местной системы отсчета, связанной с нашей планетой Земля, относительно идеальной системы отсчета, масса фундаментальной частицы в условиях Земли будет больше массы фундаментальной частицы dm в состоянии покоя. Обозначим массу фундаментальной частицы в условиях Земли как dmv. dmv = dm/ Согласно традиции механики энергия определяется как произведение силы на расстояние и представляет собой работу силы. Каждая фундаментальная частица в своей относительности движется только по становому измерению Tu с одинаковой скоростью c под действием силы основного цикла. Поскольку каждый квант состояния по становому измерению Tu соотносится только с самим собой, работа силы основного цикла по становому измерению Tu в каждом кванте состояния полностью обнуляется и в следующем кванте состояния производится заново. Энергией движения фундаментальной частицы по становому измерению Tu является работа силы основного цикла по ее смещению в кванте состояния. Сила основного цикла восстановления симметрии в каждом кванте состояния производит смещение фундаментальной частицы, на которую она действует, на размер кванта протяженности dr. ei = fidr (31), где ei – энергия движения фундаментальной частицы по становому измерению Tu, fi – сила основного цикла, действующая на фундаментальную частицу по становому измерению Tu. Все фундаментальные частицы движутся по становому измерению Tu с одинаковым ускорением в кванте состояния a0 = dr/dt2 , формула (10). ei = fidr = dmdrdr/dt2 = dmc2 (33) Таким образом, приходим к известной в физике формуле. Обнуление энергии движения фундаментальных частиц по становому измерению Tu в каждом предыдущем кванте состояния не означает «исчезновения» этой энергии. Она переходит в их потенциальную энергию в физическом пространстве за счет увеличения его размера и, как будет показано в следующих главах, действующих в нем сил. Таким образом, приходим к выводу: Потенциальная энергия фундаментальных частиц в физическом пространстве растет пропорционально пройденным квантам состояния nt. Взаимное расположение фундаментальных частиц создает прецедент нарушенной симметрии одной частицы относительно другой. Это нарушение вызывает множество циклов восстановления симметрии, тождественных основному циклу. Именно тождественных в соответствии с теоремой (т2), так как каждый из них является частью локализации. Назовем это явление гравитацией. Гравитационным циклом или гравитацией называется процесс восстановления симметрии относительно местной системы отсчета, нарушенной одной фундаментальной частицей относительно другой. Тождественность гравитационного цикла основному циклу отражается на круговом движении космических тел, рис. 25, a).
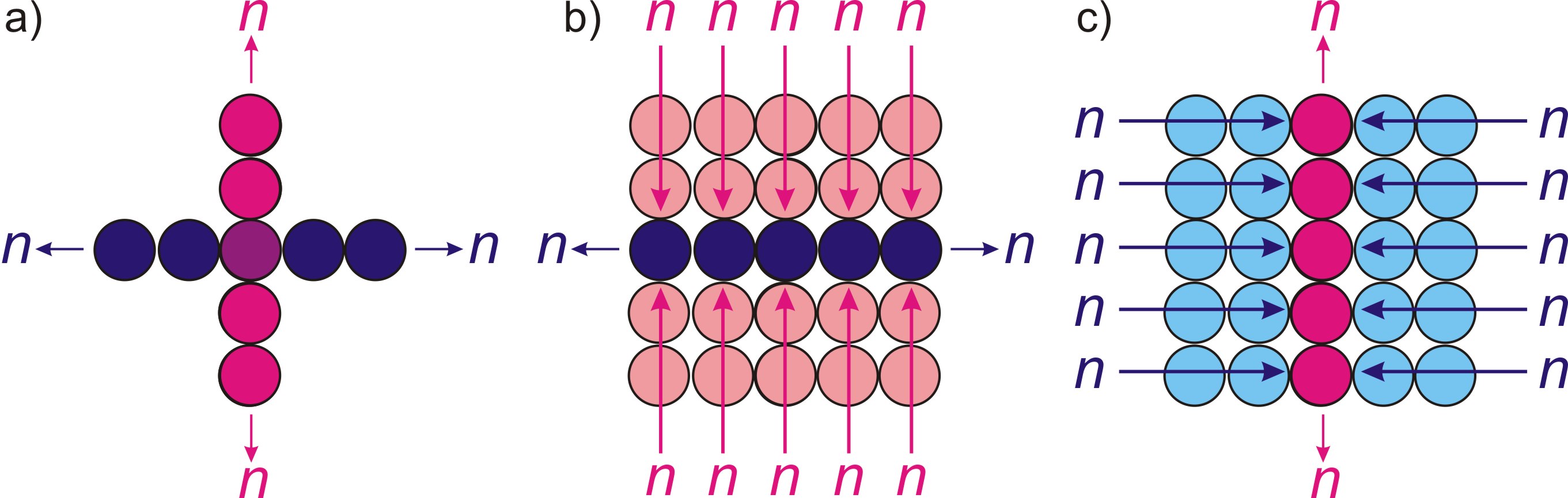
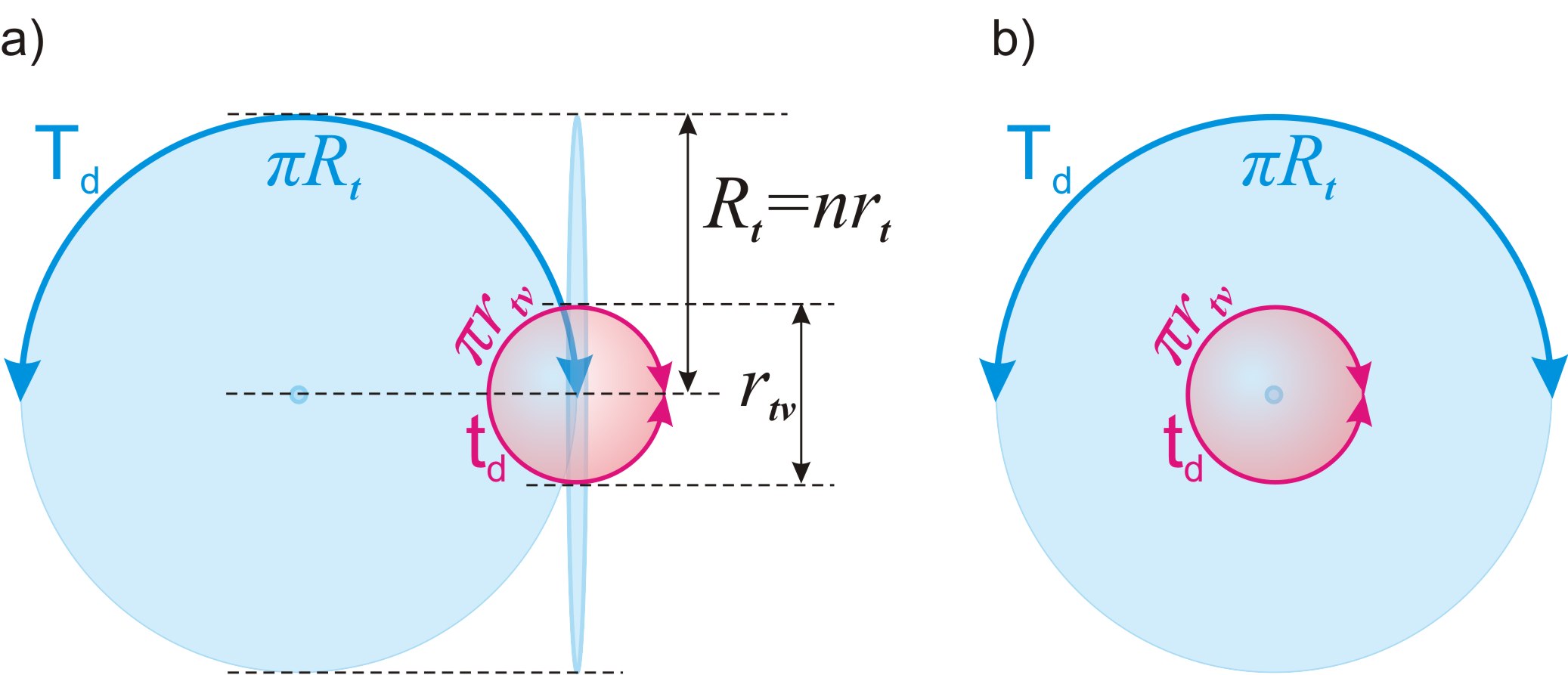
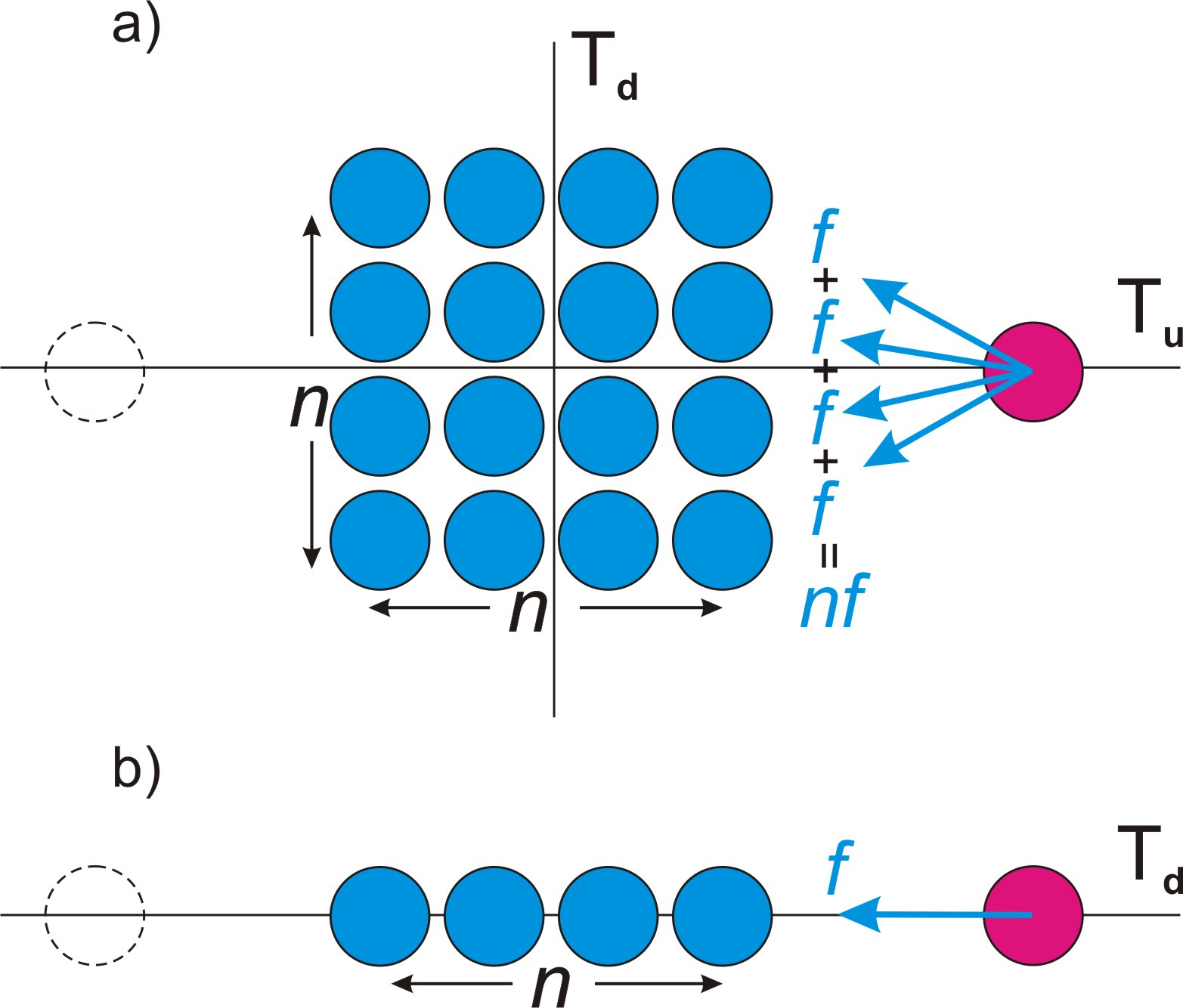
Рис. 25. В соответствии с выводом (в64) это круговое движение является инерциальным. Вектор силы взаимодействия тел на противоположных концах орбиты направлен противоположно, что тождественно соответствует двум полюсам цикла восстановления симметрии в основном цикле, рис. 25, b). Таким образом, движения космического тела по полу-орбите должно быть тождественно полному основному циклу. Пройдя по полу-орбите, гравитационный цикл повторяется вновь по второй половине, чтобы вернуться в первоначальное состояние. Сила основного цикла, воздействующая на фундаментальную частицу, является следствием ее материальной определенности по двумерной структуре TuTd потенциальной части локализации. Из принципа тождественности циклов следует, что сила гравитационного цикла должна определяться аналогично определенностью фундаментальной частицы в отношении его размера. Соответственно, если мы разделим расстояние R на размер нахождения фундаментальной частицы rt , получим определяющее число гравитационного цикла: ng = R/rt (34), где ng – определяющее число гравитационного цикла, R – расстояние между космическими телами. В основном цикле материальная и потенциальная часть тождественны и различаются только тем, что система отсчета связана с материальной частью. Каждая из них состоит из n2 своих тождественных частей, рис. 26, a).
Рис. 26. Из этого следует, что нахождение по ng2 фундаментальных частиц на противоположных полюсах гравитационного цикла является одним из основных условий его тождественности основному циклу, рис. 26, b). Назовем это условие полным гравитационным циклом. Полным гравитационным циклом называется гравитационный цикл, на каждом из противоположных полюсов которого находится количество фундаментальных частиц, равное квадрату его основного числа. Но имеется важное отличие сравниваемых циклов. Оно заключается в том, что нарушение симметрии в основном цикле проистекает относительно двумерной структуры TuTd потенциальной части, рис. 27, a). В свою очередь гравитационный цикл проистекает в физическом пространстве, в котором движение возможно только по мобильному измерению Td (вывод (в55)). Таким образом, процесс нарушения симметрии в гравитационном цикле одномерен, рис. 27, b).
Рис. 27. Гравитационный цикл представляет собой одномерную проекцию в физическое пространство основного цикла локализации, проходящего по двумерному пространству ее потенциальной части. Из условия проекции каждой части одного измерения в каждую часть другого, следует вывод, что сила двумерного основного цикла в проекции на одномерный процесс уменьшается в n раз. Второе условие тождественности циклов вытекает из того обстоятельства, что сила основного цикла, идущего по определенному становому измерению Tu, проецируется в физическое пространство на мобильное измерение Td, являющееся неопределенным. Неопределенное измерение Td в π раз длиннее по размеру определенного Tu (вывод (в17)). Работа силы цикла по смещению материальной части на полный цикл по каждому из измерений должна быть одинаковой. Из этого следует, вывод: Действие силы цикла восстановления симметрии по неопределенному измерению в π раз слабее, чем по определенному. С учетом предыдущего условия приходим к выводу: Сила полного гравитационного цикла в πn раз меньше силы основного цикла восстановления симметрии, где n – определяющее число локализации. В основном цикле на фундаментальную частицу с массой dm, движущуюся по становому измерению со скоростью c = dr/dt , действует сила f0, придающая ускорение a0 = c/dt = dr/dt2 (формула (10)) в кванте состояния. f0 = dma0 = dmdr/dt2 = dmс2/dr (35) Соответственно, в полном гравитационном цикле по мобильному измерению на фундаментальную частицу будет действовать сила в πn раз меньше: fgn = f0/πn =dmс2/πndr (36), где fgn – сила воздействия полного гравитационного цикла на одну фундаментальную частицу. Эта сила должна действовать на каждую из ng2 фундаментальных частиц одного полюса со стороны всех ng2 фундаментальных частиц другого полюса. Соответственно сила гравитационного притяжения между двумя фундаментальными частицами fg0 будет в ng2 раз меньше силы полного гравитационного цикла. В соответствии с формулой (34): fg0 = fgn/ng2 = dmс2/ng2πndr = dmс2rt2/R2πndr (37) С учетом формулы (07): rt = drnt/n Эта сила представляет собой силу гравитационного притяжения между двумя единичными массами dm, в идеальной системе отсчета. Сила, действующая между двумя любыми массами, состоящими из фундаментальных частиц, будет пропорциональна отношению каждой массы к единице массы dm. fg = (m1/dm)(m2/dm)dmс2nt2dr /R2πn3 = m1m2с2nt2dr /R2πn3dm (39) Приравняем полученную формулу силы гравитационного взаимодействия к принятой в физике: Gm1m2/R2 = m1m2с2nt2dr /R2πn3dm (40) Получаем значение гравитационной постоянной: Все компоненты этой формулы представляют собой постоянные величины, кроме nt – количества квантов состояния, пройденных локализацией. Гравитационная постоянная растет пропорционально квадрату пройденных квантов состояния nt. Этот вывод согласуется с выводом (в80) об увеличении потенциальной энергии фундаментальных частиц в физическом пространстве по ходу основного цикла локализации. Обратим внимание на то, что если в соответствии с формулой (09) в формуле гравитационной постоянной заменить drnt2/n2 на rp мы получим формулу: G=c2rp/πndm. Далее если мы подставим в эту формулу вместо dm известную массу нейтрона и значение n = 2128, мы получим значение для rp, которое совпадает с экспериментальным значением диаметра нейтрона в рамках погрешности эксперимента. Учитывая порядки используемых чисел, этого «совпадения» более чем достаточно, чтобы понять, что мы на правильном пути. Но дальше нас ждут гораздо более «удивительные» совпадения целого ряда теоретически полученных значений с соответствующими экспериментальными данными. 16. Распад фундаментальной частицы или бета-распад свободного нейтрона Любая местная система отсчета, связанная с тем или иным космическим телом, имеет ненулевую скорость инерциального движения относительно идеальной системы отсчета. Как следствие движения местной системы отсчета, связанной с Землей, со скоростью vg ее собственный относительный вектор станового измерения Tu имеет угол отклонения от направления станового измерения Tu0 идеальной системы отсчета, рис. 28, a). Этот угол отклонения станового измерения Tu должен тождественно проецироваться во внутреннее пространство элементарной локализации углом отклонения направления ее определенного измерения потенциальной части tu от аналогичного направления в состоянии покоя tu0. Это отклонение направления внутреннего определенного измерения tu элементарной локализации проецируется в физическое пространство в отношении фундаментальной частицы. В результате физическое тело фундаментальной частицы приобретает соответствующую скорость движения по проекции внутреннего неопределенного измерения td, рис. 28, b).
Рис. 28. Отношение скорости vp этого смещения материальной части элементарной локализации по внутреннему неопределенному измерению td к скорости vp0 смещения по внутреннему определенному измерению tu в кванте состояния по принципу тождества с основной локализацией (теорема (т2), вывод (в41)) должно быть равно аналогичному отношению скорости vg движения местной системы отсчета по мобильному измерению Td к скорости c ее движения по становому измерению Tu в основной локализации, рис. 28, a). В соответствии с выводом (в45), физическое тело фундаментальной частицы находится одновременно в условиях проекции внутреннего цикла элементарной локализации и в условиях физического пространства. По условиям физического пространства, скорость этого движения, набранная физическим телом в кванте состояния, сохраняется, и, в соответствии с выводом (в66), это изменение скорости начинает суммироваться по последовательности квантов состояния, и движение физического тела по внутреннему неопределенному измерению td становится равноускоренным, рис. 28, b). Ускорение этого внутреннего движения материальной части элементарной локализации ap равно отношению набираемой ею скорости vp в каждом кванте состояния к кванту протяженности dt: Найдем скорость vp0. Время протекания физических процессов настолько меньше времени полного цикла Вселенной, что размер нахождения фундаментальной частицы rt можно считать неизменным. Прирост размера физического тела фундаментальной частицы rp за один одномоментный промежуток dt, равен rt/n. Соответственно, скорость смещения физического тела фундаментальной частицы по неопределенному измерению td своей локализации равна: Применим формулу (07): rt = drnt/n vp0 = rt/ndt = ntdr/dtn2= cnt/n2 (45) Таким образом, получаем: apv = vgvp0/cdt = vgnt/dtn2 (46) С учетом формулы (2): apv = vgnt/dtn2= vgntc/drn2 (47) В соответствии с выводами (в50) и (в17), полный максимальный размер неопределенного измерения td элементарной локализации равен πdr. Таким образом, в результате прохождения физическим телом фундаментальной частицы всего этого расстояния, равного πdr, цикл элементарной локализации завершится, и она перейдет в новый цикл. Найдем время tn прохождения физическим телом фундаментальной частицы своего внутреннего цикла по проекции неопределенного измерения td потенциальной части элементарной локализации. Согласно формуле пройденного расстояния в равноускоренном движении: tn = Вследствие перехода по полному циклу элементарной локализации, физическое тело должно выйти из пространства, определяемого условиями проекции этого цикла, во внешнее по отношению к нему физическое пространство. В результате фундаментальная частица распадается на три части, отдельно проецирующиеся в физическое пространство. Этими частями являются: 1. – физическое тело, как проекция материальной части элементарной локализации, 2. – проекция потенциальной части элементарной локализации, 3 – проекция полного завершенного цикла элементарной локализации по своему внутреннему неопределенному измерению td. Движение местной системы отсчета относительно идеальной системы отсчета приводит к распаду фундаментальной частицы, как проекции внутреннего цикла элементарной локализации в физическое пространство, на три отдельные части. Промежуток времени tn = ndr Этот распад фундаментальной частицы полностью соответствует бета-распаду свободного нейтрона, что приводит нас к логичному выводу: Фундаментальной частицей нашей Вселенной, как локализации в Беспредельности, является свободный нейтрон. В следующих главах мы подтвердим этот вывод точными расчетами на основе экспериментальных данных. Все новые материальные частицы, получающиеся в результате распада фундаментальной частицы, являются тождественными проекциями в физическое пространство элементарной локализации или ее частей в тех или иных ограничивающих условиях. Дадим следующее определение: Элементарной частицей называется полная или частичная проекция элементарной локализации в физическое пространство, тождественная ей и представляющая собой материальный объект со строго ограниченным и неопределенным внутренним пространством. В соответствии с выводом (в52), в результате смещения физического тела нейтрона, как фундаментальной частицы, на полный цикл по своему внутреннему неопределенному измерению td, направление проекции определенного измерения tu внутреннего цикла элементарной локализации меняется на противоположное. Проекция определенного измерения tu внутреннего цикла элементарной локализации относительно физических тел нейтрона и протона имеет противоположное направление. При этом в результате смены направления проекции внутреннего определенного измерения tu с «изнутри - наружу» на «снаружи - внутрь» проекция нового цикла внутреннего пространства элементарной локализации должна «вывернуться наизнанку» и наложиться на физическое пространство. В результате распада фундаментальной частицы, проекция внутреннего цикла элементарной локализации накладывается на физическое пространство. Выход физического тела нейтрона за пределы проекции потенциальной части элементарной локализации не влияет на его физический размер rp, определяемый исключительно стадией основного цикла. Это условие не оставляют сомнений в том, что в своем свободном положении в новом цикле, наложенном на физическое пространство, физическое тело нейтрона становится протоном. Протон представляет собой самостоятельную проекцию в физическое пространство материальной части элементарной локализации с перевернутым на противоположное направлением проекции внутреннего определенного измерения tu. Размер физических тел нейтрона и протона одинаков. До момента распада проекции внутреннего цикла элементарной локализации, нейтрон представляет собой в физическом пространстве шаровидную область суперпозиции альтернативных положений своего физического тела (вывод (в44)). Размер этой области rt определяется проекцией внутреннего определенного измерения tu потенциальной части элементарной локализации. Акт распада нейтрона, как фундаментальной частицы, происходит после того, как его физическое тело сместится по внутреннему неопределенному измерению td на величину, превышающую полный размер внутреннего цикла πdr по этому измерению. В момент выхода физического тела из проекции внутреннего цикла его движение по внутреннему неопределенному измерению td проецируется на мобильное измерение физического пространства Td, по которому осуществляется движение в физическом пространстве (вывод (в55)). Соответственно, момент выхода имеет неопределенность равную размеру проекции физического тела на мобильное измерение, равную rp. Эта неопределенность проецируется на размер rt области нахождения физического тела в физическом пространстве, определяемый проекцией внутреннего определенного измерения tu. В соответствии с отношением размеров неопределенного и определенного измерений, равного π (вывод (в17)), размер области нахождения увеличивается на rp/π, рис. 29.
Рис. 29. rtp = rt + rp/π (50), где rtp – размер нахождения протона. В физическом пространстве протон представляет собой шаровидную область диаметра rtp как суперпозицию всех возможных положений своего физического тела. В отличие от нейтрона размер области нахождения протона не связан условиями цикла, и может изменяться в зависимости от внешних воздействий. Размер области нахождения протона, а, следовательно, и его масса представляют собой не постоянную величину, а статистическую. Учитывая формулу (09): rp = rtnt/n До момента распада свободного нейтрона, как фундаментальной частицы, все его внутреннее пространство представляло собой суперпозицию всех возможных положений проекции двумерной потенциальной части элементарной локализации. Из условия неопределенности этого пространства относительно условий физического пространства следует, что оно не только представляет собой суперпозицию всех альтернативных положений физического тела частицы, но и одновременно суперпозицию всех альтернативных положений проекции границы полного цикла элементарной локализации. После распада нейтрона и выхода физического тела за пределы этого пространства, оно превращается в самостоятельную элементарную частицу. Это следует из того, что это пространство определено условиями, выделяющими его в основной локализации. В совокупности с условием внутренней неопределенности, оно отвечает определению (о40) элементарной частицы. С учетом условия смены направления проекции определенного измерения tu внутреннего цикла элементарной локализации (вывод (в52)), новая частица представляет собой область нахождения границы окончания цикла, спроецированного на физическое пространство (вывод (в89)) и двигающегося «снаружи – вовнутрь», рис. 30.
Рис. 30. Конечным состоянием элементарной локализации в обратном цикле является начальное состояние в ее прямом цикле. Проекция начального состояния цикла элементарной локализации в физическое пространство представляет собой фундаментальную частицу в первом кванте состояния основного цикла, при nt = 1. В соответствии с логикой распада свободного нейтрона этой второй новой элементарной частицей является электрон, а размер фундаментальной частицы в первом кванте состояния основного цикла можно считать физическим размером (диаметром) электрона. Поскольку в первом кванте состояния Rt = dr, находим физический размер электрона: re = dr/n = const (52), где re – размер физического тела электрона. Физическое тело электрона представляет собой проекцию начального состояния внутреннего цикла элементарной локализации, при nt = 1 . Размер физического тела электрона является неизменным по всему циклу локализации Вселенной. При этом внутреннее пространство физического тела электрона является неопределенным относительно физического пространства. Электрон является элементарной частицей и представляет собой в физическом пространстве область нахождения своего физического тела. Выход физического тела нейтрона из проекции внутреннего цикла элементарной локализации проецируется в физическое пространство выходом из области неопределенности, которую представляет собой фундаментальная частица. Таким образом, с момента выхода, движение физического тела должно подчиняться условиям движения в физическом пространстве, то есть, двигаться по мобильному измерению Td. Как результат, весь пройденный им путь по внутреннему неопределенному измерению td накладывается на мобильное измерение Td. Путь, пройденный физическим телом нейтрона внутри цикла, проецируется на мобильное измерение Td линейным отрезком. Из условия неопределенности физического тела фундаментальной частицы по внутреннему неопределенному измерению td, следует, что оно движется одновременно по его обоим противоположным направлениям на полную величину цикла, соответствующего во внутреннем пространстве полуокружности размера πdr. А поскольку оно движется относительно физического пространства в одном направлении, следует, что оно проходит полный путь по неопределенному измерению td внутреннего пространства одновременно в двух направлениях, рис. 31.
Рис. 31. Таким образом, полный размер пути, пройденного физическим телом, проецируется на мобильное измерение Td физического пространства двумя размерами πdr полного внутреннего цикла, с точкой смены направления между ними, рис. 32.
Рис. 32. Этот путь проецируется с неопределенностью, равной размеру нахождения πrt физического тела по неопределенному измерению td в отношении размера каждого из двух противоположных циклов. Следует учесть и размер rtp неопределенности положения физического тела протона по мобильному измерению, относительно которого проецируется весь этот путь. Таким образом, суммарный размер 2πdr + 2πrt + rtp является определяющим условием для области нахождения электрона на момент его формирования, как самостоятельной элементарной частицы. rtev = 2πdr + 2πrt + rtp = 2πdr + 2πrt + rt + rtnt/nπ (53), где rtev – размер нахождения электрона на момент его формирования по мобильному измерению Td. Величина rtnt/nπ в данном размере слишком мала, и ею можно пренебречь: С учетом формулы (07): rtev = 2πdr + 2πrt + rt = 2πdr(1 + nt/n(1+1/2π)) (54) В соответствии с выводом (в59) проекция размера фундаментальной частицы на мобильное измерение Td равна ее размеру rt по определенному измерению Ru физического пространства. Этот вывод основан на том, что при отсутствии движения фундаментальной частицы, мобильное измерение Td и определенное измерение Ru находятся в суперпозиции альтернативных вариантов перпендикулярности друг к другу, имеющей в физическом пространстве форму шара. По аналогичной логике формируется и пространство нахождения электрона, но принцип проекции размера с одного измерения на другое противоположен. В случае с электроном, его размер определяется проекцией движения по внутреннему циклу на мобильное измерение Td в физическом пространстве, а уже потом этот размер rte проецируется на определенное измерение Ru физического пространства. Диаметр области нахождения электрона определяется проекцией полного цикла материальной части элементарной локализации по ее внутреннему неопределенному измерению td на мобильное измерение Td Увеличение размера области нахождения электрона с rt до rtev не может произойти мгновенно. Максимальная скорость движения в физическом пространстве не может превышать c (вывод (в25)). При этом необходимо учесть то, что на прямой путь по мобильному измерению Td проецируется внутреннее неопределенное измерение td, путем своего разворота, рис. 33.
Рис. 33. Отношение массы протона к массе электрона достаточно велико, и скоростью vp, которую он приобретает в процессе «расталкивания» с электроном можно пренебречь. Таким образом, учитывая максимальную скорость движения c, электрон в процессе своего роста приобретает скорость c/π своего движения по мобильному измерению Td, в местной системе отсчета, связанной с Землей. В соответствии с формулой (31) найдем размер нахождения электрона покоящегося относительно местной системы отсчета, связанной с Землей. rte = rtev/ В процессе распада нейтрона, при движении его физического тела с ускорением по внутреннему неопределенному измерению td, рис. 34, a), его движение во внутреннем цикле по определенному измерению tu полностью накладывается на него, и они меняются местами, рис. 34, b).
Рис. 34. Таким образом, при выходе физического тела распавшейся фундаментальной частицы в условия физического пространства внутреннее неопределенное измерение элементарной локализации tu в отношении электрона и протона проецируется на мобильное измерение Td физического пространства, рис. 34, c). Это смещение внутреннего определенного измерения потенциальной части tu на место ее неопределенного измерения td, при его проекции в физическое пространство, должно тождественно отражаться на всех остальных измерениях, а также на самих основных частях, рис. 35, a).
Рис. 35. В результате при проекции в физическое пространство внутреннего пространства фундаментальной частицы происходит сдвиг всех четырех его измерений на 90o. В результате распада фундаментальной частицы: внутреннее определенное измерение потенциальной части элементарной локализации tu проецируется на мобильное измерение Td; неопределенное измерение потенциальной части элементарной локализации td проецируется на определенное измерение материальной части основной локализации Ru; определенное измерение материальной части элементарной локализации ru проецируется на неопределенное измерение материальной части основной локализации Rd; неопределенное измерение материальной части элементарной локализации rd проецируется на определенное измерение потенциальной части основной локализации Tu. Учитывая смену направления проекции определенного измерения tu внутреннего цикла в момент распада нейтрона (вывод (в88)), а также двумерность потенциальной части элементарной локализации (вывод (в7)), приходим к выводу: Область нахождения электрона, покоящегося в системе отсчета, представляет собой суперпозицию всех возможных положений плоского круга, как проекции двумерной структуры tutd потенциальной части элементарной локализации, диаметром которого является развернутая проекция двух противоположных направлений внутреннего определенного измерения tu таким образом, что они всегда повернуты направлением внутрь, с преломлением направления на противоположное по середине. Эта ситуация с покоящимся электроном изображена на рис. 36, a).
Рис. 36. При движении электрона мобильное измерение Td , на которое спроецировано внутреннее определенное измерение tu потенциальной части элементарной локализации, проецируется относительно него направленным вектором, рис. 36, b). Определенное измерение Ru материальной части основной локализации, на которое спроецировано внутреннее неопределенное измерение td потенциальной части элементарной локализации, проецируется перпендикулярно вектору движения и представляет собой суперпозицию всех альтернативных своих положений. Область нахождения движущегося электрона представляет собой цилиндр диаметра и высоты rtev, ось которого направлена по вектору движения, представляющий собой суперпозицию всех возможных положений проекции двумерной структуры tutd потенциальной части элементарной локализации, ориентированной по мобильному измерению Td и неопределенной по двум другим измерениям Ru и Rd физического пространства. Из вывода (в89), сделанного в предыдущей главе, следует, что проекция силы внутреннего цикла элементарной локализации в физическое пространство определяет силу притяжения между протоном и электроном. Используя принятые в физике термины, приходим к следующим выводам: Электрические силы представляют собой проекцию силы внутреннего цикла элементарной локализации в физическое пространство. Электрический заряд представляет собой неделимый квант силы, как проекцию силы внутреннего цикла одной элементарной локализации в физическое пространство. Поскольку традиционно электрический заряд протона считается положительным, а электрона отрицательным, следует вывод: Отрицательный заряд определяется прямой проекцией направления станового измерения элементарной локализации в физическое пространство, а положительный заряд его обратной проекцией. Поскольку две элементарные частицы, обладающие одноименным зарядом, представляют собой проекции внутренних циклов двух разных элементарных локализаций, наложенные на одно и то же физическое пространство, между ними должна возникать сила, стремящаяся раздвинуть их собственные циклы. Благодаря неопределенности мобильного измерения, это расталкивание проекций циклов отражается силой отталкивания одноименных зарядов по мобильному измерению Td. Из принципа симметрии и тождественности (теоремы (т2) и (т3)) следует: Сила отталкивания двух одноименных зарядов равна по величине силе притяжения двух разноименных зарядов. Сила внутреннего цикла элементарной локализации проецируется в физическое пространство силой внутреннего цикла фундаментальной частицы. Для нахождения формулы силы электрического взаимодействия, необходимо найти силу внутреннего цикла фундаментальной частицы. Прирост размера физического тела фундаментальной частицы в кванте состояния определяется отношением его размера rp к количеству пройденных квантов состояния nt. С учетом формулы (09): Эта величина представляет собой квант протяженности элементарной локализации, или размер физического тела фундаментальной частицы по внутреннему определенному измерению tu. Найдем ускорение этого процесса: ap = rt/ndt2 (57), где ap - ускорение движения физического тела фундаментальной частицы по ее внутреннему циклу в кванте состояния. В соответствии с формулой (22): fn = mpap = mprt/ndt2 (58), где fn – сила внутреннего цикла фундаментальной частицы, mp - масса физического тела фундаментальной частицы в ее внутреннем цикле. Масса фундаментальной частицы dm в отношении основного цикла представляет собой ее материальную определенность относительно двух измерений Tu и Td потенциальной части основной локализации рассчитываемую относительно соответствующих проекций ее размера нахождения. По существу, это масса физического тела фундаментальной частицы, но с условием неопределенности его положения относительно области диаметра rt. Соответственно, в отношении внутреннего цикла масса физического тела будет больше во столько же раз, во сколько раз его размер меньше размера внутреннего потенциального пространства фундаментальной частицы. По проекции внутреннего неопределенного измерения td потенциальной части элементарной локализации физическое тело не выделено, и, соответственно, его определенность по этому измерению равна 1. По проекции внутреннего определенного измерения tu потенциальной части элементарной локализации размер физического тела фундаментальной частицы определяется отношением размера нахождения фундаментальной частицы rt к определяющему числу n, рис. 37.
Рис. 37. Таким образом, приходим к выводу: Материальная определенность физического тела элементарной частицы в ее внутреннем цикле в n раз больше ее материальной определенности в отношении основного цикла. Соответственно масса физического тела фундаментальной частицы в отношении внутреннего цикла с учетом ее движения относительно идеальной системы отсчета будет равна dmvn. С учетом этого для силы внутреннего цикла получаем: fn = mprt/ndt2= dmvnrt/ndt2 = dmvrt/dt2 (59) Применим также формулы (07) и (02): fn = dmvrt/dt2 = dmvdrnt/ndt2 = dmvc2nt/ndr (60) Необходимо учесть то, что сила, действующая по внутреннему определенному измерению tu, проецируется на мобильное измерение Td, которое является неопределенным. Аналогично выводу (в82) как результат этого условия проекции, величина силы уменьшается в π раз. fen = fn/π = dmvc2nt/πndr (61) , где fen – проекция силы внутреннего цикла фундаментальной частицы в физическое пространство. По принципу тождества с гравитационным циклом (глава15, определение (о39)), как проекцией основного цикла в физическое пространство, эта сила будет действовать в полном электрическом цикле, когда на его полюсах будет находиться количество противоположных зарядов, равное определяющему числу ne электрического цикла. Определяющее число электрического цикла должно определяться аналогично определяющему числу гравитационного цикла по формуле (34): ne = R/rt, где R – расстояние между взаимодействующими зарядами. С учетом формулы (07): Получаем формулу силы взаимодействия двух зарядов на расстоянии R: fe0 = fen/ne2 = dmvc2nt/πndrne2 = dmvc2nt3dr/πn3R2 (63) Поскольку увеличение заряда с каждой из сторон соответственно увеличивает силу взаимодействия, эта сила пропорциональна произведению количества единичных зарядов: fe = (q1/q0)(q2/q0)fe = q1q2fe/q02 = q1q2dmvc2nt3dr/πn3q02R2 (64), где q0 — единичный заряд или коэффициент системы мер, q1 и q2 — взаимодействующие заряды. Сравним с известной в физике формулой электрического взаимодействия: fe = Qq1q2/R2 , где Q — электрическая постоянная. Получаем значение электрической постоянной: Эта формула содержит переменную величину количества пройденных Вселенной квантов состояния nt. Электрическая постоянная растет пропорционально кубу количества квантов состояния nt, пройденных Вселенной. Учитывая то, что количество противоположных зарядов в относительности любой местной системы отсчета равно количеству распавшихся фундаментальных частиц, приходим к следующему выводу: В относительности любой местной системы отсчета количество положительных зарядов равно количеству отрицательных. Обратим внимание на то, что разделив формулу (65) электрической постоянной на формулу (41) гравитационной постоянной мы получаем формулу для количества квантов состояния nt, пройденных нашей Вселенной: Если пренебречь разницей между массой нейтрона dmv в системе отсчета, связанной с Землей, и его массой в состоянии покоя dm, то мы легко находим значение для nt, как отношение силы электрического взаимодействия двух единичных зарядов к силе гравитационного взаимодействия двух нейтронов. Получаем значение: nt ≈1,2•1036 Степень полученного числа не оставляет сомнений в том, что определяющим числом локализации нашей Вселенной является: Именно эта находка (только вместо массы нейтрона использовалась масса протона) и подсказала автору направление всего дальнейшего исследования. В результате были получены гораздо более точные значения, включая и скорость движения Земли во Вселенной, результатом которой является разница между массой нейтрона dmv и теоретически вычисленной его массой в идеальной системе отсчета dm. Поэтому мы не будем спешить с вычислениями, и предварительно найдем еще несколько важных формул, которые позволят нам получить теоретическое значение массы нейтрона. Движение электрона и протона под действием электрической силы осуществляется по мобильному измерению Td. Масса электрона намного меньше массы протона и основной импульс взаимного движения приобретает электрон. К моменту столкновения импульс электрона достаточно велик, и он продолжает двигаться так, что протон проходит сквозь его область нахождения. При этом протон с момента проникновения в область нахождения электрона находится в условиях двух пространств: физического и внутреннего пространства электрона. Когда протон, двигаясь к границе своего цикла, проходит во внутреннем пространстве электрона расстояние, превышающее πdr, проекция внутреннего определенного измерения tu меняет свое направление на противоположное. Таким образом, возникают колебательные движения области нахождения электрона относительно протона, создающие стабильное состояние атомы водорода, рис. 38, a).
Рис. 38. Атом водорода представляет собой устойчивый процесс колебаний проекции границы цикла элементарной локализации относительно протона во внутреннем пространстве области нахождения электрона. Этот процесс во внутреннем пространстве электрона проецируется в физическое пространство неопределенностью положения области нахождения электрона относительно протона, рис. 38, b). Таким образом, никаких колебаний противоположных зарядов относительно физического пространства внутри атома водорода не происходит. Колебательное взаимодействие электрона и протона происходит относительно внутреннего пространства области нахождения электрона, а относительно физического пространства атом водорода не имеет колебаний и движется как цельный физический объект. Размер атома водорода определяется размером области нахождения электрона, которая, в свою очередь, определяется по минимальному значению двумя размерами неопределенного измерения td полного цикла элементарной локализации, равными 2πdr. Сравнительное увеличение этого размера в связи с потерей электроном энергии незначительно. Таким образом, необходимо приходим к важному выводу: Размеры атомов по ходу цикла Вселенной остаются неизменными, в то время, как размер Вселенной увеличивается в n = 2128 раз. Из этого вывода следует, что размеры твердых космических тел, таких, как наша планета, незначительно меняются по ходу цикла Вселенной, а космические расстояния между ними увеличиваются. Таким образом, с учетом вывода (в84), приходим к следующему выводу: Ускорение свободного падения на поверхности планеты увеличивается пропорционально квадрату пройденных Вселенной квантов состояния. Это увеличение сдавливающих планету сил, возможно, является одной из главных причин внутреннего разогрева планеты. Если колебательное движение области нахождения электрона в одном направлении относительно протона превысит размер 2πdr развернутой проекции двух внутренних циклов элементарной локализации по ее неопределенному измерению td, электрон вынужден будет перейти в новый цикл со сменой направления проекции внутреннего определенного измерения tu элементарной локализации. Учитывая, что переход в новый цикл осуществляется по развернутой проекции двух противоположных циклов неопределенного измерения td, проекция определенного измерения tu должна дважды сменить свое направление на противоположное. В результате такой двойной смены направления проекции определенного измерения tu электрон возвращается в свое первоначальное состояние проекции в физическое пространство. В относительности физического пространства этот двойной цикл по проекции внутреннего неопределенного измерения td осуществляется по определенному измерению Ru физического пространства, на которое оно спроецировано. Проекции последовательных циклов одной и той же элементарной локализации не могут накладываться друг на друга. Это условие необходимо следует из принципа полной внутренней замкнутости цикла. Как результат этих условий, завершенный двойной цикл должен удаляться от нового цикла с максимально возможной скоростью c. При максимальной скорости движения c, квант протяженности физического процесса (определение (о30)) наложения предыдущего и последующего циклов неизменно равен расстоянию, их разделяющему. В соответствии с выводом (в68) их пространственные взаимоотношения остаются неопределенными, и они находятся в суперпозиции двух альтернативных вариантов – проекции в пространство одного из них при отсутствии проекции другого. Из этого следует, что этот двойной цикл представляет собой выделенную тождественную часть материальной части основной локализации и является материальной частицей, рис. 39, a).
Рис. 39. Этот же вывод о движении новой частицы со скоростью c следует из тождественности ее движения по определенному измерению Ru физического пространства, движению фундаментальной частицы по определенному (становому) измерению Tu. Несложно догадаться, что в данном случае мы имеем дело с фотоном. В результате испускания фотона масса электрона уменьшается, а его радиус нахождения увеличивается c rte1 и rte2. Эта разница размера нахождения определяет разницу масс электрона до испускания фотона и после и равна энергии отделившейся частицы. В результате испускания фотона, размер нахождения электрона увеличивается, а масса уменьшается. Весь процесс отделения фотона проецируется на определенное измерение Ru размером rγ, который по определению (о30) представляет собой квант протяженности процесса, или, как это принято называть – квант света. В соответствии с выводом (в68), последовательность частей процесса в пределах кванта протяженности rγ является неопределенной, рис. 39, b). Размер кванта протяженности фотона rγ, традиционно в физике называется длинной его волны. rγ = сdtγ (69), где dtγ – размер кванта протяженности процесса в единицах времени. Процесс отделения фотона от электрона является одномоментным и представляет собой суперпозицию всех альтернативных последовательностей его частей. Это означает, что внутреннее пространство фотона неопределенно, и отвечает определению (о40) элементарной частицы. Фотон представляет собой элементарную частицу, отделяющуюся от электрона в результате смещения проекции потенциальной части элементарной локализации на два последовательных цикла по своему неопределенному измерению td. Движение фотона осуществляется по определенному измерению Ru физического пространства с максимально возможной скоростью c. В соответствии с выводом (в101) область нахождения электрона в движении представляет собой суперпозицию альтернативных положений проекции двумерной структуры потенциальной части элементарной локализации tutd на мобильное Td и определенное Ru измерения физического пространства, рис. 40, a). Процесс отделения фотона происходит в одном случайно выбранном положении этой двумерной структуры, рис. 40, b).
Рис. 40. Направление мобильного измерения Td в отношении фотона, как проекции двумерной структуры потенциальной части элементарной локализации, имеет строгую векторную ориентацию. С учетом неопределенности положения этой двумерной структуры по неопределенному измерению физического пространства Rd размера 2πdr, приходим к выводу: Фотон, как строго ориентированная двумерная структура по определенному Ru и мобильному Td измерениям физического пространства, по его третьему неопределенному измерению Rd представляет собой суперпозицию своих альтернативных положений размера 2πdr. В каждом из этих альтернативных положений размер фотона по мобильному измерению Td определяется минимальным размером кванта состояния внутреннего цикла фотона. Этот минимальный размер представляет собой проекцию физического тела электрона и определяется его физическим размером 2πdr/n. Физический размер фотона по мобильному измерению равен 2πdr/n, а размер его области нахождения по этому измерению равен 2πdr. Ориентация фотона в физическом пространстве определяет его свойство поляризации, рис. 40, c). Поляризация фотона определяется направлением проекции мобильного измерения Td относительно него. Все местные системы отсчета в своей относительности находятся в центре физического пространства, относительно которого проецируется его определенное измерение Ru, по которому движется фотон с максимально возможной скоростью c. Взаимное движение местных систем отсчета происходит по мобильному измерению Td, которое является неопределенным. Этим и объясняется независимость движения фотонов от движения физических тел – они движутся по разным, перпендикулярным друг к другу измерениям. Фотон движется с максимально возможной скоростью c по определенному измерению Ru физического пространства относительно любой местной системы отсчет, независимо от скорости ее движения. В соответствии с определением (о36) материальная определенность фундаментальных частиц и их частей, цикл которых осуществляется по становому измерению, определяется относительно двумерной структуры TuTd потенциальной части основной локализации, по которой происходит их смещение в квантах состояния. Смещение фотона в квантах состояния в соответствии с выводом (в119) происходит по двумерной структуре мобильного Td и определенного Ru измерений физического пространства. Таким образом, по принципу тождества (теорема (т2)), материальная определенность фотона должна определяться относительно этих двух измерений. Размер фотона по определенному измерению физического пространства Ru равен rγ, и его определенность по этому измерению в соответствии с определением (о35) равна Rt/rγ. По второму мобильному измерению Td, размер фотона определяется развернутой проекцией двух противоположных циклов элементарной локализации по своему внутреннему неопределенному измерению td потенциальной части и равен 2πdr. Соответственно, по каждому из двух противоположных направлений этого измерения фотон выделен размером πdr. С учетом размера πRt мобильного измерения Td, определенность фотона по нему равна πRt/πdr. На основании определения (о36) найдем материальную определенность фотона: uγ = (πRt/πdr)(Rt/rγ) = Rt2/drrγ (70), где uγ – материальная определенность фотона. Применим формулу (06): Найдем массу фотона по формуле (21): mγ = kuγ , где mγ – масса фотона. Применим формулу (25): k = dm/n2 mγ = kuγ = knt2dr/rγ = dmnt2dr/n2rγ (72) Частотой фотона в физике называется величина отношения скорости его движения c к длине его волны rγ. γ = c/rγ = 1/dtγ (73) , где γ – частота фотона. Размеры фотона не зависят от стадии основного цикла. Соответственно остается неизменной и частота фотона. Частота и размер фотона не зависят от количества пройденных квантов состояния и не изменяются по ходу основного цикла. Энергия фотона должна определяться работой силы цикла восстановления симметрии в его кванте состояния при движении по определенному измерению Ru: eγ = mγaγrγ (74), где aγ – ускорение набора скорости c фотоном в его кванте состояния. aγ = c/dtγ Применим формулу (69): rγ = cdtγ С учетом формулы (72): eγ = mγc2 = dmc2nt2dr/n2rγ (76) Заменим в ней длину волны на частоту: eγ = dmc2nt2dr/n2rγ = γdmcnt2dr/n2 (78) Сравнивая эту формулу с принятой в физике формулой: eγ = hγ, где h - постоянная Планка. Получаем: Величина постоянной Планка и энергия фотона, растут пропорционально квадрату пройденных квантов состояния. 21. Определяющее число Вселенной и масса фундаментальной частицы Наконец, мы получили все необходимые нам формулы, дающие возможность на основе экспериментальных данных об одних физических характеристиках нашего физического мира получить теоретическое значение других его основных характеристик и сравнить с их экспериментальным значением. Это позволит не только доказать правильность нашей теоретической модели, но и получить некоторые совершенно новые для науки точные данные физических характеристик нашей Вселенной. Разделим формулу (79) постоянной Планка на формулу (41) гравитационной постоянной: h = dmcnt2dr/n2 G = c2drnt2/πn3dm Все компоненты этой формулы нам известны, с учетом уже сделанного вывода в главе 18 и формулы (68) относительно значения определяющего числа локализации нашей Вселенной: n = 2128 G = 6,67384(80)•10-11 м3/кгс2 c = 299 792 458 м/с h = 6,62606957(29)•10-34 Джс Получаем значение единицы массы: dm = Экспериментально полученная масса нейтрона: dmv = 1,674927351(74)•10-27 кг Такое совпадение с расхождением всего в 0,4% не оставляет сомнений в том, что наша Вселенная представляет собой локализацию восьмого порядка с определяющим числом n равным 2128. Проводить расчеты для других порядков локализаций не имеет смысла, так как отличие будет на десятки порядков. Наша Вселенная представляет собой локализацию восьмого порядка с определяющим числом 22. Точное значение скорости движения Земли во Вселенной Небольшое различие единицы массы dm и массы нейтрона dmv объясняется движением местной системы отсчета, связанной с нашей планетой. С помощью полученной нами ранее формулы (30) увеличения массы фундаментальной частицы (нейтрона) в местной системе отсчета, двигающейся со скоростью vg относительно идеальной системы отсчета, можем найти точное значение этой скорости движения нашей планеты в космическом пространстве. 1- vg2/c2 = (dm/dmv)2 vg2/c2 =1- (dm/dmv)2 vg2 =(1- (dm/dmv)2)c2 vg = c Местная система отсчета, связанная с планетой Земля, движется относительно идеальной системы отсчета со скоростью 26 013 292 м/с. По логике процесса эта скорость должна определяться движением Земли вокруг центра галактики. Но накопленные к данному моменту космические наблюдения и расчеты не показывают такой большой скорости. Проблема состоит в методике расчетов, которые не учитывают искажение проекции космических процессов на дальних расстояниях в условия местной системы отсчета, связанной с Землей вывод (в58-1). Это же относится и к выводам о существовании «темной материи» и «темной энергии». То, что найденное значение скорости соответствует реальности, покажет дальнейшее вычисление на его основе времени распада свободного нейтрона, которое в точности совпадает с экспериментальным. 23. Количество квантов состояния, пройденных Вселенной Как мы уже отмечали в главе 18, полученные нами формула (41) для гравитационной постоянной и формула (65) для электрической постоянной позволяют найти точное значение nt — количества квантов состояния, пройденных нашей Вселенной. G = c2drnt2/πn3dm Q = dmvc2nt3dr/πn3q02 Разделим эти формулы друг на друга: Подставим известные табличные значения: Q = 8,9875517873681764•109 Нм2/Кл2 q0 = 1,602 176 565(35)•10-19 Кл G = 6,67384(80)•10-11 м3/кгс2 dmv = 1,674927351(74)•10-27 кг И найденное нами значение единицы массы (83): dm = 1,66861•10-27 кг Получаем: Найдем коэффициент отношения полного цикла к пройденной части: Цикл локализации нашей Вселенной прошел 1/275 часть своего полного размера. 24. Точные характеристики нейтрона и кванта состояния Теперь у нас есть все необходимые значения, чтобы вычислить размер нахождения rt нейтрона и его физический размер rp , а также размер кванта протяженности в единицах длины dr и единицах времени dt. Из формулы (41) найдем размер dr: G = c2drnt2/πn3dm dr = Gπn3dm/c2nt2 = 1,0025089•10-10 м (90) dt = dr/c = 3,3440099•10-19 с (91) Используя формулы (07) и (09) найдем размеры rt и rp: rt = ntdr/n = Gπn2dm/c2nt = 3,644042•10-13 м (92) rp = nt2dr/n2 = Gπndm/c2 = 1,324581•10-15 м (93) Экспериментальным путем получен приблизительный физический размер (диаметр) нейтрона (rp) - 1,6•10-15 м. 25. Точные физические характеристики Вселенной Исходя из полученных значений рассчитаем основные характеристики Вселенной и сравним с известными науке. Найдем время жизни Вселенной: T = ntdt = 4,13620•1017 с = 1,31•1010 лет, или 13,1 миллиарда лет. (94) Как видим, этот результат полностью согласуется с современными научными данными. Найдем радиус Вселенной в соответствии с формулой (06): Rt = ntdr = 1,244695•1026 м (95) 26. Расчет времени распада свободного нейтрона (бета-распада) По полученной нами ранее формуле (49) вычислим время распада свободного нейтрона: tn = ndr Все компоненты этой формулы нам известны и мы можем вычислить это время: Экспериментально определенная скорость распада свободного нейтрона 880 и 865 секунд в различных условиях постановки эксперимента. Полученный результат в комментарии не нуждается. 27. Расчет массы электрона и протона Размер всех элементарных частиц по становому измерению Tu равен кванту протяженности dr. Таким образом, материальная определенность (определение (о36)), а, соответственно, и масса элементарных частиц, имеющих массу покоя, в соответствии с определением (о35), должна быть обратно пропорциональна их размеру нахождения. mi0 = dmrt/rti (97), где mi0 – масса элементарной частицы в состоянии покоя, rti – размер нахождения элементарной частицы. С учетом скорости движения Земли: mi = dmvrt/rti (98), где mi – масса элементарной частицы, покоящейся в системе отсчета, связанной с Землей. В соответствии с формулами (55) и (54), найдем размер нахождения электрона. rte = 2πdr(1 + nt/n(1+1/2π)) / Найдем массу электрона: me = dmvrt/rte = 9,15701•10-31кг (100) Экспериментально известной массой электрона считается: 9,10938291(40)•10-31кг. Разница на 0,52% является еще одним ярким подтверждением данной теории. В соответствии с формулой (51), найдем размер нахождения протона. rtp = rt (1 + nt/nπ) Найдем массу протона: mp = dmvrt/rtp = 1,6729916•10−27 кг (102) Экспериментально известная масса протона: 1,672621777(74)•10−27 кг Разница в 0,02% между вычисленной массой и экспериментальной, и 16% между экспериментальной разницей масс нейтрона и протона и ее теоретическим значением. Конечно, важнее второе, но это расхождение в 16%, тем не менее, хороший результат. Возможно, протон при взаимодействиях и образовании атомов теряет энергию, и его радиус нахождения увеличивается, что не противоречит данной теории (вывод (в93)). Третьей частицей бета-распада свободного нейтрона (вывод (в85)) является антинейтрино, представляющее собой проекцию полного цикла элементарной локализации по внутреннему неопределенному измерению td на определенное измерение Ru физического пространства. В результате этого полного цикла по проекции внутреннего неопределенного измерения td, происходит смена направления проекции внутреннего определенного измерения tu с ориентации «изнутри - наружу» на противоположную – «снаружи - внутрь». Аналогично фотону (вывод (в117)) антинейтрино должно двигаться с максимально возможной скоростью c по определенному измерению Ru физического пространства, рис. 41, a).
Рис. 41. В отличие от фотона, который представляет собой проекцию двойного полного цикла элементарной локализации по своему внутреннему неопределенному измерению td, на определенное измерение Ru физического пространства, антинейтрино представляет собой проекцию аналогичного одинарного цикла. Антинейтрино движется с максимально возможной скоростью c по определенному измерению Ru физического пространства относительно любой местной системы отсчета, независимо от ее скорости движения. Поскольку цикл антинейтрино представляет собой смену ориентации проекции определенного измерения tu цикла элементарной локализации с «изнутри - наружу» на «снаружи - внутрь», следующим ее циклом в обратном взаимодействии с другими частицами должна быть смена ориентации проекции измерения tu со «снаружи - внутрь» на «изнутри - наружу». Из этого условия необходимо следует, что антинейтрино может вступать в реакцию только с протоном и электроном, направление проекции измерения tu относительно которых имеет соответствующую ориентацию - «снаружи - внутрь». И не может вступать в реакцию с нейтроном (также с позитроном), направление проекции измерения tu относительно которых противоположно. Из принципа симметрии (theorem (t3)) следует возможность существования противоположной для антинейтрино частицы, цикл которой представляет собой смену ориентации проекции определенного измерения tu цикла элементарной локализации со «снаружи - внутрь» на «изнутри - наружу». Этой частицей является нейтрино, рис. 41, b). Нейтрино представляет собой проекцию полного цикла элементарной локализации в физическое пространство со сменой направления проекции определенного измерения tu ее потенциальной части со «снаружи - внутрь» на «изнутри - наружу», а антинейтрино аналогичную проекцию полного цикла с противоположной сменой этого направления с «изнутри - наружу» на «снаружи - внутрь». Таким образом, следующим циклом для нейтрино должна быть смена ориентации проекции измерения tu с «изнутри - наружу» на «снаружи - внутрь», что и определяет логику его реакций с другими частицами. Антинейтрино может вступать в реакции с протоном и электроном и не может вступать в реакции с нейтроном и позитроном, а нейтрино, наоборот, может вступать в реакции с нейтроном и позитроном, и не может вступать в реакции с протоном и электроном. Этот теоретический вывод находится в строгом соответствии с современными экспериментальными данными. В дополнение к сказанному мы должны записать еще один важный вывод, подводящий черту под незавершенные споры в физике относительно скорости движения нейтрино и наличия у нее массы покоя: Нейтрино и антинейтрино движутся в физическом пространстве с максимально возможной скоростью c относительно любой местной системы отсчета, а понятие массы покоя в отношении них не имеет физического смысла. В результате распада нейтронов, в соответствии с выводом (в89), проекции циклов разных элементарных локализаций накладываются друг на друга в физическом пространстве. Таким образом, относительно каждой заряженной частицы все остальные заряженные частицы одного с ней знака оказываются внутри проекции ее цикла. В этой ситуации происходит взаимное нарушение симметрии зарядами одного знака друг относительно друга. В соответствии с выводом (в99) в отношении зарядов внутреннее определенное измерение tu элементарной локализации проецируется на мобильное измерение Td, а неопределенное td на определенное измерение физического пространства Ru. Таким образом, тождественно процессу гравитации, проходящему по мобильному измерению Td, процесс взаимного нарушения симметрии зарядами происходит по определенному измерению физического пространства Ru. Как следствие этого нарушения симметрии возникает еще один тип циклов восстановления симметрии – магнитный. Поскольку речь идет о проекции внутреннего цикла элементарной локализации, то и сила в этом новом типе циклов представляет собой тождественную проекцию силы электрического взаимодействия. Магнитное взаимодействие является следствием взаимного нарушения симметрии одноименными электрическими зарядами и представляет собой тождественную проекцию силы электрического взаимодействия. Вектор магнитной силы должен совпадать с направлением определенного измерения Ru и быть перпендикулярным мобильному измерению Td физического пространства относительно заряженной частицы. В случае параллельного движения одноименных зарядов, направление определенного измерения Ru физического пространства относительно обоих зарядов совпадает с соединяющей их линией, рис. 42, a).
Рис. 42. Поскольку мобильное измерение Td проецируется относительно каждой частицы вектором ее движения, то относительно заряженных частиц, направление движения которых не параллельно, направление определенного измерения Ru будет не совпадать с соединяющей их линией, рис. 42, b). Одним из условий магнитной силы является то, что она, как следствие взаимного нарушения симметрии зарядами, действует по прямой линии, соединяющей их. Поэтому оба взаимодействующих заряда следует рассматривать как единую систему отсчета, вектор мобильного измерения Td относительно которой направлен перпендикулярно соединяющей их линии, рис. 42, c). Из этого необходимо следует вывод: Магнитная сила, действующая между двух одноименных зарядов, определяется проекциями их движения на перпендикулярное направление к вектору силы. Относительно протона направление проекции определенного измерения tu внутреннего цикла перевернуто на противоположное (вывод (в90)). Из этого следует, что магнитная сила в отношении двух протонов, двигающихся в одном направлении, будет проецироваться противоположно гравитационной, то есть, силой отталкивания. Электрон движется по проекции внутреннего цикла элементарной локализации навстречу протону. Таким образом, направление его движения по циклу совпадает с движением по циклу основной локализации. Из этого следует, что магнитная сила в отношении двух электронов, двигающихся в одном направлении, будет проецироваться силой притяжения. Магнитная сила в отношении двух протонов, двигающихся в одном направлении, действует как отталкивание, а двух электронов, двигающихся в одном направлении, как притяжение. Найдем условия проекции силы электрического взаимодействия в магнитные циклы. Внутренний цикл элементарной локализации по определенному измерению tu проецируется на мобильное измерение физического пространства Td. Это измерение является неопределенным, и в отношении каждой движущейся частицы проецируется вектором ее движения. Таким образом, скорость движения частицы в физическом пространстве относительно идеальной системы отсчета является единственным определяющим условием для размера этой проекции. Если частица движется со скоростью v относительно идеальной системы отсчета, то ее смещение в кванте состояния равно vdt. Этому смещению в кванте состояния соответствует полный цикл размером ntvdt. Размер проекции внутреннего цикла элементарной локализации в физическое пространство относительно частицы, обладающей зарядом, определяется скоростью ее движения относительно идеальной системы отсчета и равен ntvdt. Для простоты, рассмотрим вариант параллельного движения зарядов. Определенность заряда относительно проекции внутреннего цикла, соответствующая материальной определенности частиц в отношении основного цикла (определения (о35) и (о36)), должна определяться относительно этого размера ntvdt. Но при этом, нарушение симметрии зарядами друг относительно друга происходит по определенному измерению физического пространства Ru, размер которого больше и равен Rt (вывод (в38)). Соответственно, проекция силы цикла восстановления симметрии в магнитный цикл должна уменьшаться пропорционально отношению этих размеров в Rt/ntvdt раз. С учетом формул (06) и (02): Rt = ntdr c = dr/dt Rt/ntvdt = ntdr/ntvdt = c/v (103) Это уменьшение силы в проекции в магнитный цикл происходит относительно одного из зарядов, двигающегося со скоростью v. Аналогичное уменьшение силы в проекции в магнитный цикл должно происходить относительно каждого из зарядов, в соответствии с их скоростью движения относительно идеальной системы отсчета. Таким образом, для двух частиц в магнитном цикле, движущихся параллельно со скоростями v1 и v2 сила электрического взаимодействия проецируется пропорционально v1v2/с2 : fm = fev1v2/с2 (104), где fm – магнитная сила, действующая между двумя зарядами, движущимися параллельно. Из этой формулы следует, что при движении частиц в противоположных направлениях, одна из проекций скорости становится отрицательной, и в результате сила меняет направление на противоположное. Магнитная сила в отношении двух протонов, двигающихся в противоположных направлениях, действует как притяжение, а двух электронов, двигающихся в противоположных направлениях, как отталкивание. Этот вывод очень важен для экспериментов с притяжением или отталкиванием параллельных проводников с электрическим током. В любой инерциальной системе отсчета скорость движения зарядов складывается из скорости движения самих проводников и скорости движения электронов относительно проводников. В отношении движения проводников, магнитные силы положительных зарядов и отрицательных уравновешивают друг друга своим противоположным направлением. Таким образом, результирующая магнитная сила определяется исключительно скоростью движения электронов относительно проводника. Магнитная сила, действующая между двумя проводниками с электрическим током определяется скоростью движения зарядов относительно проводников в любой инерциальной системе отсчета и не зависит от скорости движения системы отсчета или скорости движения проводников. Воспользуемся, полученной нами, формулой (64) электрического взаимодействия: fe = q1q2dmvc2nt3dr/πn3q02R2 fm = q1q2dmvv1v2nt3dr/πn3q02R2 (105) Воспользуемся, полученной нами, формулой (65) электрической постоянной: Q = dmc2nt3dr/πn3q02 Эта формула полностью соответствует формуле, полученной экспериментальным путем: fm = µ0q1q2v1v2/4πR2 µ0 = 4πQ/с2 = 4π•10-7н/А2 (107) В соответствии с выводом (в136), сделанным в предыдущей главе, размер проекции внутреннего цикла элементарной локализации в физическое пространство в отношении заряда определяется скоростью его движения относительно идеальной системы отсчета и равен ntvdt. Этот размер ntvdt представляет собой полный размер проекции определенного измерения tu потенциальной части элементарной локализации на мобильное измерение Td в кванте состояния nt и по принципу симметрии равен размеру проекции определенного измерения ru материальной части этой элементарной локализации. При воздействии на заряженную частицу некоторой силы, ее скорость движения начинает меняться. Как результат, изменяется размер проекции внутреннего цикла на мобильное измерение Td, и, соответственно, изменяется размер этой проекции на неопределенное измерение физического пространства Rd, на которое спроецировано определенное измерение ru материальной части элементарной локализации. Таким образом, при воздействии силы f1 на частицу обладающую зарядом по мобильному измерению Td, это воздействие тождественно проецируется воздействием силы fd по неопределенному измерению физического пространства Rd, рис. 43.
Рис. 43. Сила fd проецируется перпендикулярно определенному измерению физического пространства Ru, и ее величина зависит от расстояния до заряда, на который воздействует сила f1. В отношении заряженных частиц проекции циклов элементарных локализаций в физическое пространство накладываются друг на друга. Из принципа тождества зарядов следует, что сила fd, действующая в отношении одного из зарядов по неопределенному измерению физического пространства Rd, должна воздействовать на любую частицу, обладающую одноименным зарядом, в зависимости от условий проекции. Это воздействие силы на второй заряд, по принципу обратной проекции, должно отразиться силой f2, воздействующей на нее по мобильному измерению Td. Магнитная индукция представляет собой проекцию силы, воздействующей на заряд по мобильному измерению Td, на неопределенное измерение Rd физического пространства относительно этой частицы. Важно отметить, что имеется два варианта проекции направления определенного измерения ru материальной части элементарной локализации на неопределенное измерение Rd физического пространства, рис. 44, a) и b).
Рис. 44. Тот факт, что реализуется только один из вариантов, рис. 44, a), является следствием первоначального акта выбора одного из двух измерений потенциальной части основной локализации в качестве определенного (станового, Tu), или того, по которому смещается цикл восстановления симметрии. Этот выбор тождественно проецируется выбором одного из двух направлений мобильного измерения Td в качестве вектора движения тел в физическом пространстве. Далее этот выбор определяет направление проекции определенного измерения ru материальной части элементарной локализации на неопределенное измерение физического пространства Rd после распада фундаментальной частицы (нейтрона). В случае нашей Вселенной этот выбор отражается выбором правозакрученного варианта действия электромагнитных сил. Относительно Беспредельности оба варианта: правозакрученный и левозакрученный представляют собой два тождественных и противоположных варианта. Направление вектора магнитной индукции, относительно направления силы, действующей на заряд, так называемое в физике «правило буравчика» или правозакрученность, является следствием первоначального выбора одного из двух измерений потенциальной части основной локализации в качестве определенного измерения, по которому движется цикл восстановления симметрии. При совмещении в физическом пространстве области нахождения протона с областью нахождения нейтрона, на физическое тело протона накладываются дополнительные условия проекции внутреннего пространства фундаментальной частицы, как проекции внутреннего цикла элементарной локализации. Направление проекции определенного измерения tu внутреннего цикла элементарной локализации в относительности протона и нейтрона противоположны. Соответственно внутри области нахождения нейтрона между физическими телами протона и нейтрона начинает действовать сила, равная силе электрического притяжения, устремляющая их друг к другу. В этой ситуации физическое тело нейтрона представляет собой для протона границу его цикла восстановления симметрии, к которой он движется. Физическое тело протона, со своей стороны, аналогично представляет собой для физического тела нейтрона границу его цикла, к которой он движется. Сближение физических тел протона и нейтрона происходит по условиям физического пространства – по мобильному измерению Td. Внутреннее пространство нейтрона, как фундаментальной частицы, является неопределенным относительно физического пространства, и его условия, такие как стадия цикла, не препятствуют этому сближению. В результате физические тела протона и нейтрона сближаются настолько, что начинают совмещаться в одной области физического пространства. До начала наложения области нахождения протона на область нахождения нейтрона их физические тела определялись их размерами нахождения rt для нейтрона и rtp для протона. По мере сближения и наложения физических тел, размер области нахождения протона в отношении нейтрона сокращается по мобильному измерению Td с размера rtp до размера физического тела rp, рис. 45.
Рис. 45. Соответственно его определенность в отношении физического тела нейтрона по мобильному измерению Td увеличивается на отношение его размера нахождения rtp к размеру его физического тела rp. В соответствии с формулой (08) и найденным значением (89): rtp/rp ≈ rt/rp = n/nt = 275,0 (108) Это увеличение определенности (определение (о35)) ведет к пропорциональному увеличению размера нарушенной симметрии одного физического тела относительно другого, что ведет к пропорциональному увеличению силы их притяжения. Сила взаимодействия протона и нейтрона в ядре дейтерия в n/nt = 275,0 раз больше силы электрического взаимодействия двух единичных зарядов на аналогичном расстоянии. Взаимное наложение физических тел протона и нейтрона возможно только до достижения каждым из них проекции центра внутреннего пространства другого. Дальнейшее их сближение невозможно, так как это требует переворота направления проекции внутреннего определенного измерения tu одного из них. Такой переворот направления проекции определенного измерения tu возможен только в результате полного цикла по неопределенному измерению td. Наложение внутреннего пространства физических тел нейтрона и протона не может происходить более, чем до взаимного достижения проекции центра внутреннего пространства друг друга. Этот процесс наложения физических тел нейтрона и протона не влияет на процесс движения физического тела нейтрона по внутреннему неопределенному измерению td своей локализации, вызываемый движением частной системы отсчета, связанной с Землей. Физическое тело нейтрона двигается так же, как и при распаде свободного нейтрона по внутреннему неопределенному измерению tu своей локализации с ускорением. Вместе с ним двигается и сцепленное с ним физическое тело протона. В результате, через полный цикл по проекции неопределенного измерения td элементарной локализации физическое тело нейтрона выходит из проекции ее внутреннего пространства, и направление проекции определенного измерения tu в отношении него меняется на противоположное. Направление проекции определенного измерения tu в отношении физического тела протона аналогично меняется на противоположное, и оно занимает место в проекции цикла, освобожденное физическим телом нейтрона. Таким образом, оба физических тела, двигаясь по проекции замкнутого неопределенного измерения td элементарной локализации, переворачиваются относительно внутренней и внешней границы проекции ее внутреннего пространства, аналогично движению по «ленте Мебиуса», рис. 46.
Рис. 46. Положение на начало цикла показано на рис. 46, a). После полного цикла по неопределенному измерению td, физические тела протона и нейтрона меняются местами относительно внутреннего и внешнего пространства, рис. 46, b). Следующий полный цикл снова меняет их местами, рис. 46, c). Физические тела протона и нейтрона через каждый полный цикл смещения по проекции неопределенного измерения td элементарной локализации меняются местами, представляя собой поочередно фундаментальную частицу (нейтрон). Таким образом, возникает стабильное, не распадающееся, состояние сцепления протона и нейтрона. Нейтрон в связке с протоном представляют собой динамически стабильное состояние. Размер нахождения rt нейтрона остается неизменным, но за счет выхода за его пределы прицепленного физического тела протона, размер радиуса нахождения их сцепки увеличивается на rp/2, рис. 47.
Рис. 47. По условию связки обоих физических тел, этот размер нахождения будет одинаково проецироваться относительно каждого из них. rtd = rt + rp/2 (109), где rtd – размер нахождения сцепки физических тел протона и нейтрона. В соответствии с этим изменением размера нахождения пропорционально изменится определенность каждого из них по мобильному измерению Td и, соответственно, масса. Найдем массу ядра дейтерия, как сумму двух барионов, масса каждого из которых определяется размером нахождения сцепки их физических тел, по формуле (98): md = 2dmvrt/rtd = 2dmvrt/(rt + rp/2) = 2dmv/(1 + nt/2n) (110) , где md – масса ядра дейтерия. Экспериментально известная масса ядра дейтерия - 3,343 583 20(17)•10-27 кг. Расхождение всего на 0,005%. Достаточная точность совпадения расчетной и экспериментальной масс ядра дейтерия не оставляет сомнений в правильности теории. Найдем значение силы взаимодействия протона и нейтрона в ядре дейтерия на расстоянии rp, используя уже найденную нами формулу (63)электрического взаимодействия двух зарядов: fe0 = dmvc2nt3dr/πn3R2 fnp= (n/nt)fe0 = (n/nt)dmvc2nt3dr/πn3rp2 = dmvc2nt2dr/πn2rp2 (112), где fnp – сила ядерного взаимодействия в ядре дейтерия. Применим формулу (09): rp = nt2dr/n2 fnp = dmvc2nt2dr/πn2rp2 = dmvc2n2/nt2drπ (113) Вычислим точное значение этой силы, используя табличные и найденные значения (в125),(88),(90): dmv = 1,674927351(74)•10-27 кг c = 299 792 458 м/с n = 2128 nt = 1,23690•1036 dr = 1,0025089•10-10 м fnp = dmvc2n2/nt2drπ = 36 175,0 н (114) Современная физика рассматривает барионы (протоны и нейтроны) как состоящие из трех субатомных частиц — кварков. В экспериментах кварки проявляют себя исключительно в очень малой области и очень малом промежутке времени, и выделить их в самостоятельное существование невозможно. В отличие от классического взгляда физики на измерения пространства, исключительно как на структурные характеристики, возможные для измерения, данная теория рассматривает измерения пространства, как части локализации Вселенной, тождественные любым иным ее частям, представляющим собой выделенные материальные объекты. Это означает, что в пределах кванта состояния процесса (определение (о30)), в соответствии с выводом (в68), в определенных рамках эксперимента можно зафиксировать проекцию элементарной частицы на любое из измерений физического пространства, как самостоятельный физический объект. В пределах кванта состояния процесса, существует возможность разделения процесса измерения элементарной частицы на три отдельных стадии по каждому из измерений физического пространства, воспринимаемых как самостоятельные материальные частицы. Подобный процесс происходит при экспериментальном обнаружении трех кварков, составляющих барион. Неопределенное и определенное свойства измерений определяют два типа кварков. Нейтрон, как тождественная часть материальной части основной локализации, определяется в физическом пространстве тремя его измерениями (глава 7, вывод (в32)): одним определенным измерением Ru и двумя неопределенными измерениями Td и Rd (udd). Протон в соответствии с выводом (в99) определяется в физическом пространстве проекциями определенного tu и неопределенного td измерений потенциальной части элементарной локализации и проекцией определенного измерения ru ее материальной части. Соответственно, протон определяется в физическом пространстве двумя определенными и одним неопределенным измерениями (uud). Кварки представляют собой проекцию свойств бариона на определенное и неопределенное измерения. Кварк (u) отражает свойства определенного измерения локализации. Кварк (d) отражает свойства неопределенного измерения локализации. -------------------- |
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Сейчас посетителей в разделе : 1 |